

Introduction
Materials and Methods
Sweet potato harvesting and transportation system
Sweet potato harvesters and power sources
Comparative analysis of harvesters and performance metrics
Results and Discussion
Harvest rates for various harvester types
Damage rates for various harvester types
Conclusion
Introduction
Sweet potato (Ipomoea batatas L.) is a typical root crop and is gaining popularity among farmers owing to its ability to grow in poor environments and its resistance to pests and diseases. Sweet potato also benefits from a higher yield per unit area compared with those of other food crops, such as rice, wheat, and corn (Lee et al., 2022, 2023; Park et al., 2021). Sweet potatoes contain vitamins, minerals, and dietary fiber and colored sweet potato varieties developed through breeding contain various functional components, such as anthocyanins and beta-carotene, making them popular health foods. In South Korea, Jeonnam, Jeonbuk, Gyeonggi, and Chungnam provinces are the main sweet potato producers, with Jeonnam and Jeonbuk producing about 170,000 tons in 2022, accounting for approximately 51% of the total production (KOSIS, 2023a).
Recently, the agricultural sector has experienced a shortage of labor due to the decrease in the agricultural population and aging of farmers, making the mechanization of field agriculture essential. In 2022, the mechanization rate of agriculture in Korea was approximately 99.3% for paddy farming; however, the mechanization rate was lower for field farming at approximately 63.3% (KOSIS, 2023b). In particular, in 2022, the mechanization rates were approximately 12.6%; for sowing and transplanting processes in field agriculture and 32.4% for harvesting processes, indicating that these operations have significantly lower mechanization rates compared with those for tillage and pest control operations in field crops (KOSIS, 2023c). For sweet potato cultivation, the low mechanization rate results in high labor costs. Increasing the rate of mechanization in sweet potato harvesting operations is essential, as labor costs are rising rapidly due to recent inflation, which can increase the cost of production.
In South Korea, there are no specialized sweet potato harvesters in widespread use. Various underground crop harvesters attached to tractors, cultivators, and farm machinery are used for sweet potato harvesting. These crop harvesters are categorized into the following types: vibrating digger, vibrating digger with conveyor, and vibrating digger with rotating rod conveyor (RDA, 2021). When harvesting sweet potatoes using underground crop harvesters, the digging blade penetrates beneath the ridge, resulting in a high excavation rate. However, the relatively thin skin of sweet potatoes is damaged by soil removal and impact during the transfer process after digging. Damage to the sweet potato skin exposes the internal tissue, potentially leading to decreased marketability due to moisture loss, shrinkage of internal tissue, dry weight reduction, and susceptibility to pathogen invasion and decay (Ray and Ravi, 2005; Shin et al., 2023; Tomlins et al., 2002; Wang et al., 2013). As a result of these concerns, sweet potato farmers use plow-type machines for harvesting, which cause less damage to the skin, thereby preserving marketability. However, plow-type machines result in a high rate of unharvested sweet potatoes, depending on the shape and size of the plow blade and how it is operated. Additionally, the lack of a soil removal process requires workers to perform this step during collection. It is necessary to develop a sweet potato harvester that reduces both skin damage and unharvested rates with the potential for expansion to a collection-type harvester.
Shen et al. (2023) developed a combine-type sweet potato harvester to reduce the rate of sweet potato skin damage. They reported a sweet potato damage rate of 0.94% when operating at a working speed of 1 m/s. Zhang et al. (2024) analyzed skin damage caused by friction during mechanical sweet potato harvesting in a theoretical framework, providing foundational data for the design of a sweet potato harvester.
International companies are commercializing tractor-mounted and self-propelled sweet potato harvesters and distributing them to farmers. Domestic companies have supplied farms with vibration digging-type harvesters for underground crops that can perform continuous digging and soil removal; however, in the case of sweet potato crops, these harvesters are not widely used owing to the potential for skin damage. Although vibration digging-type harvesters have become popular with farmers of potato, onion, and garlic crops, sweet potato farmers generally use plow-type working machinery. While plow-type working machinery reduces skin damage and improves marketability, it is limited by high unharvested rates and poor soil removal, requiring additional labor post-harvest and resulting in slow harvesting speeds. There is a need to develop a sweet potato harvester with a high harvesting speed and low rate of skin damage.
In this study, a dual-conveyor sweet potato harvester was developed and its performance was compared with those of existing sweet potato harvesting methods, including plow-type working machinery and vibration digging-type harvesters for underground crops.
Materials and Methods
Sweet potato harvesting and transportation system
This study involved sweet potato farmers who grow more than 10 ha in South Korea using a harvesting system, as shown in Fig. 1. The data presented in this study are based on a field survey of large farmers in Gochang-gun, Jeollabuk-do during harvesting operations. The sweet potato harvesting operation consists of breaking the sweet potato stalks (Fig. 1(A)), removing plastic mulch (Fig. 1(B)), digging up sweet potatoes using a harvester (Fig. 1(C)), tilling and boxing sweet potatoes (Fig. 1(D)), and loading trucks (Fig. 1(E)). At harvest, the labor force consists of two people to operate and assist with the stalk shredder, two people to remove plastic mulch, two people to operate and assist with the harvester, three people to load the truck, and around 15 people to shake off the soil from the excavated sweet potatoes and pack them into boxes. To streamline operations, on-site sorting of sweet potatoes is not performed.

Sweet potato harvesters and power sources
As mentioned earlier, owing to the lack of a dedicated sweet potato harvester, vibration digger-type, conveyor-type, and plow-type working machinery are used for digging. Vibration digging-type harvesters for underground crops separate sweet potatoes and soil through the up and down movement of guides mounted on the rear of the harvester after digging. Conveyor-type subsoil harvesters use a conveyor after digging to transport and remove dirt from the sweet potatoes. Vibration digging-type harvesters damage underground due to the contact between the guide and the sweet potato in the process of soil loosening due to the up and down movement of the guide. Transfer conveyor-type subsoil harvesters cause damage due to the friction between the transfer conveyor and the sweet potato skin in the process of transferring the sweet potato after digging, resulting in low usage rates among sweet potato farmers. Korean sweet potato farmers typically use plow-type working machinery instead of vibration digging-type and transfer conveyor-type harvesters to reduce the rate of skin damage during harvesting. Since the plow-type working machinery is operated in such a way that the subsoil is inverted into the upper soil while breaking the bank, the soil is not crushed separately. The sweet potato is stuck to the soil, and those formed in the upper soil are buried deeply in the lower soil when the soil is inverted. Accordingly, the workers who pack boxes have to manually separate the sweet potato from the soil using shovels. Most farmers use a plow-type sweet potato harvester; however, some farmers who have difficulty securing labor to perform additional tilling work use a combination of plow-type and vibration digging-type harvesters.
In this study, we aimed to develop a low-damage sweet potato harvester in the form of a double-conveyor type with scalability as a collection-type harvester that can prevent damage to the sweet potato skin between harvests and replace the sweet potato packaging workforce.
A schematic and prototype for a dual-conveyor sweet potato harvester are shown in Fig. 2. The double-conveyor sweet potato harvester was designed for a 60 hp tractor and was equipped with a 500-mm-long digging blade to improve the digging rate over that of conventional plow-type working machinery. It was designed in two stages for efficient digging. In addition, a disk blade was mounted next to the digging blade to cut the remaining stalks of the sweet potato without entering the machine. The conveying unit was chain-driven. To compensate for the shortcomings of conventional conveying conveyor-type subterranean crop harvesters, the conveyor was equipped with rubber packing to reduce damage to the sweet potato skin between transfers. The conveyor was 2,000 mm long and designed in two stages for efficient dusting. A collection guide was designed at the rear of the sweet potato conveying part to prevent external impact that may occur when the harvested sweet potato falls. The design specifications for the dual-conveyor-type sweet potato harvester developed in this study are shown in Table 1.
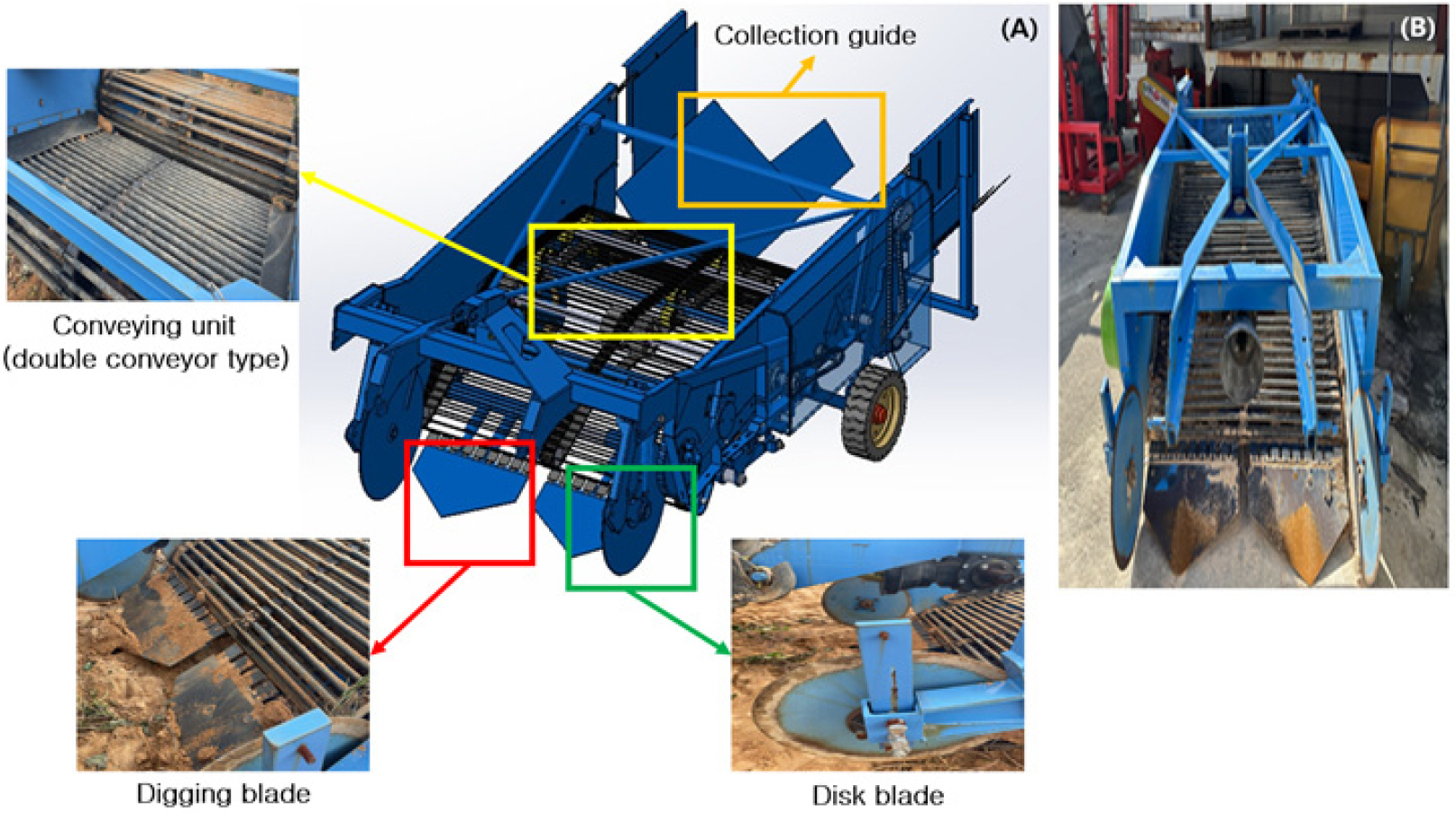
Table 1.
Specifications of the double conveyor-type sweet potato harvester
| Type | Double conveyor-type |
| Row | 2 |
| Working width (mm) | 1,500 |
| Length (mm) | 3,100 |
| Height (mm) | 1,500 |
| Power requirement (PS) | 60 |
We compared the performance of the newly developed low-damage sweet potato harvester with those of the widely used vibration digging-type harvester and plow-type working machinery; the specifications are shown in Table 2. The vibration digging-type harvester was a two-type harvester manufactured by Hyundai Agricultural Machinery (Iksan) with a working width of 1,680 mm. The plow-type working machinery was a four-row plow made by Seohae Purau (Gimje), with a working width of 2,800 mm and four tines; the sweet potatoes were dug up using the tines. In this study, two tractors with similar horsepower were used to account for the time-consuming replacement of tractor-mounted sweet potato harvesters. The tractors used for the dual-conveyor sweet potato harvester and the vibratory digger were the 58-hp A5800 from Kukje Machinery, and the plow was a 55-hp TE58 from TYM. The working speed of the tractor was 1 km/h in low first gear, and the tractor operator drive speed was set to PTO first gear (540 RPM). The specifications of the tractors used in this study are shown in Table 3.
Table 2.
Specifications of the sweet potato harvesters


Table 3.
Specifications of the agricultural tractors


Comparative analysis of harvesters and performance metrics
The performance of the sweet potato harvester developed in this study was evaluated empirically. The empirical test was conducted in a sweet potato cultivation field in Kimje City, Jeollabuk-do (Fig. 3), where the sweet potato variety was Beniharuka, planted in a standardized single-row system. The soil in the sweet potato field was identified as red clay loam in the soil profile provided by the National Institute of Agricultural Science, Korea Rural Development Administration. This comparative analysis of harvesters was conducted with the help of an operator with over 20 years of experience. Sweet potato stalk shredding was done using a tractor-mounted stalk shredder before harvest, and the trial was conducted on October 26, 2023 after plastic vinyl mulching removal. For ground crops, such as sweet potatoes, the physical properties of the soil can affect yield characteristics. Therefore, in this study, we investigated the physical characteristics of the harvesting fields before the sweet potato harvest. The survey included soil strength, soil moisture, and soil electrical conductivity (EC) as well as growing conditions, such as row spacing, row width, and row distance. Soil strength was measured using DIK-5532 (Daiki Rika Kogyo Co., Ltd, Japan), and soil EC and moisture were measured using WT-2000 (Mirae Sensor, Korea); the specifications of the sensors used are shown in Table 4. The methods for measuring soil physical properties are shown in Fig. 4. Five points in the sweet potato field were randomly selected to measure soil strength, soil moisture, and soil EC by the depth of the bank and furrow. For the growing environment, the ridge distance, bank width, bank height, furrow width, and interrow distance of the sweet potato field were measured, and the measured soil physical properties and growing conditions are shown in Table 5, 6.

Table 4.
Specifications of sensors


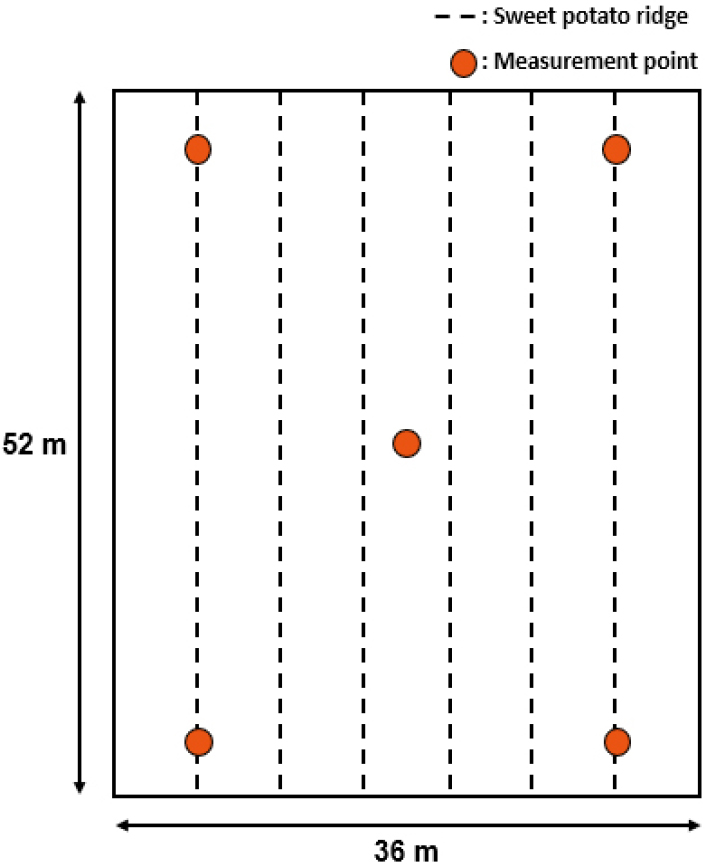
Table 5.
Soil physical properties in the sweet potato field
Table 6.
Cultivation environment in the sweet potato field (units: m)
|
Field length |
Field width |
Ridge width |
Bed width |
Bed height |
Furrow width |
Planting distance |
| 52 | 36 | 0.7 | 0.4 | 0.3 | 0.3 | 0.2 |
The sweet potato harvesting test was implemented by the sweet potato landowners. The sweet potato harvester was used to dig up sweet potatoes from the point where the harvester entered 1 m from the beginning of the furrow. The harvester was driven 5 m for each trial, with a total of 3 replicates. For the harvester performance metrics in this study, the harvest rate and damage rate were measured. The digging rate was calculated as the total weight of sweet potatoes within the harvested 5-m section divided by the weight of sweet potatoes dug using the harvester (Equation (1)). The damage rate was estimated as the weight of damaged sweet potatoes divided by the weight of dug sweet potatoes (Equation (2)). The total weight of sweet potatoes was represented as the sum of the weight of sweet potatoes excavated using the machine and the weight of unexcavated sweet potatoes. To measure the weight of unexcavated sweet potatoes, the excavated sweet potatoes were removed after the machine’s work was completed, and the unexcavated sweet potatoes were collected by checking the inside of the two piles of sweet potatoes and weighed.
= Digging ratio (%)
= Weight of all sweet potatoes (kg)
= Weight of dug sweet potatoes (kg)
= Damage ratio (%)
= Weight of damaged sweet potatoes (kg)
To measure the harvesting and damage rates of the sweet potato harvester, the sweet potato weights and damaged sweet potato weights were measured. Since sweet potato is a typical tuberous root crop, the rhizome is also excavated when digging; accordingly, the rhizome was removed and weighed. As shown in Fig. 5(A), immature sweet potatoes were excluded from the sweet potato weight calculation because they were not considered merchantable.
Sweet potato damage is largely due to peeling of the outer skin between digging operations (Fig. 5(B)) and harvesters (Fig. 5(C)). In consultation with the Institute of Bioenergy Crops of the National Institute of Food and Agriculture, we defined peeling as the detection of more than 2 cm of epidermis, and sweet potato breakage as the detection of a cut surface due to external impact. In this study, damage included peeling of the skin between digging operations and breakage of the sweet potato by the harvester. A one-way ANOVA was used for comparisons of sweet potato harvester performance, followed by Duncan’s multiple comparison tests at a 5% significance level.

Results and Discussion
Harvest rates for various harvester types
The harvest rates based on how the sweet potato harvester works are shown in Table 7. The vibration digging-type harvester and plow-type working machinery had harvesting rates of 92.48% and 97.10%, respectively, while the double-conveyor-type sweet potato harvester built in this study had a harvesting rate of approximately 98.59%. Vibration digging-type harvesters are thought to have a lower extraction rate due to the shorter tillage intervals, making it hard to loosen the soil for re-burying. Soil removal is performed through the feeding section of the vibration digging-type harvester; if the feeding section is short, soil and sweet potato separation is not smooth and the sweet potato and soil fall in a lumpy form. They are relatively heavier than the excavated sweet potato and settle into the soil, where they are further covered by the loosened soil and are not visible above the topsoil. Using labor, there is a risk of uncollected sweet potatoes, resulting in low yields. Since the sweet potato harvester is designed as a two-stage conveyor with a 2,000 mm conveying section, the digging rate is high because the digging section is relatively long, and fewer sweet potatoes are re-buried in the soil. Because the plow-type working machine breaks up the tillage and leaves the sweet potatoes above the topsoil, fewer sweet potatoes are re-buried in the soil, and the harvesting rate is expected to be similar to that of the dual-conveyor sweet potato harvester developed in this study. A statistical analysis revealed that the harvesting rate did not differ among sweet potato harvesters (P > 0.05), indicating that there is no significant difference in the harvesting rate among harvester types.
Table 7.
Digging properties according to harvester type
|
Harvester Type | Total | Digging | Not Digging | Digging | Pr > F | |||||||
|
Weight (kg) |
Standard deviation |
Weight (kg) |
Standard deviation |
Weight (kg) |
Standard deviation |
Ratio (%) |
Standard deviation | |||||
| Vibration digging | 14.4 | 3.8 | 13.3 | 3.8 | 1.1 | 0.5 | 92.48 | 4.07 | 0.1060 (NS) | |||
| Plow type | 18.0 | 4.9 | 17.5 | 4.6 | 0.6 | 0.5 | 97.10 | 2.57 | ||||
| Double conveyor | 15.6 | 1.0 | 15.3 | 0.7 | 0.2 | 0.3 | 98.59 | 2.06 | ||||
Damage rates for various harvester types
The damage rates for each type of sweet potato harvester are shown in Table 8. The vibration digging-type harvester, plow-type working machinery, and dual-conveyor sweet potato harvesters had damage rates of approximately 77.10%, 53.42%, and 29.55%, respectively. In the case of the vibration digging method, the sweet potatoes were damaged due to impact during the up and down movement during the process of transportation and dusting after excavation. In the case of the plow method, some sweet potatoes were damaged by the plow blade when the dyke was crushed. The double-conveyor-type sweet potato harvester was equipped with rubber packing on the conveying conveyor to minimize friction between the conveying part and the surface of the sweet potato during the transfer process after digging and transport, which is believed to cause less damage to the sweet potato skin. The damage rate differed significantly among sweet potato harvesters (P ≤ 0.05) and was lowest for the double-conveyor sweet potato harvester developed in this study.
Table 8.
Damage rates according to harvester type
|
Harvester Type | Digging | Damage | Pr > F | |||||
|
Weight (kg) |
Standard deviation |
Weight (kg) |
Standard deviation |
Ratio (%) |
Standard deviation | 0.0117 (*) | ||
| Vibration digging | 13.3 | 3.8 | 10.2 | 3.0 | 77.10 b | 17.04 | ||
| Plow type | 17.5 | 4.6 | 9.5 | 3.7 | 53.42 ab | 6.37 | ||
| Double conveyor | 15.3 | 0.7 | 4.5 | 1.8 | 29.55 a | 12.95 | ||
The double-conveyor sweet potato harvester developed in this study had a lower damage rate than those of the existing sweet potato harvesters (i.e., the vibration digging-type and plow-type); however, the damage rate was approximately 30%, making it difficult to apply this method to fields. Therefore, we will further optimize the design of the double conveyor to further reduce the damage rate in the future. The soil of the sweet potato field in this study was red loam, characterized by small particle sizes and high viscosity; it is possible that the soil caused damage between digging. Further research is necessary to improve the structure of the sweet potato harvester and to evaluate the harvesting performance according to the soil type. We will also evaluate the effects of environmental conditions at the sweet potato fields, such as the slope of the field and height of the mounds.
Conclusion
In this study, a tractor-mounted dual-conveyor sweet potato harvester was developed and its performance was evaluated to prevent skin damage during sweet potato harvesting. The harvester was designed with a double 2,000 mm conveyor, and rubber packing was installed on the conveying part to prevent damage to the sweet potato skin. The digging and damage rates of the vibration digging-type harvester, plow-type working machinery, and newly developed harvester were compared. The performance evaluation was conducted using the sweet potato variety at a farm in Beniharuka in Gimje City, Jeollabuk-do, with a tractor traveling at approximately 1 km/h and the PTO set to 540 m. The harvesting rates were 92.48% for the vibration digging type, 97.10% for the plow type, and 98.59% for the newly developed harvester. The damage rates were 77.10% for the vibration digging type, 53.42% for the plow type, and 29.55% for the newly developed harvester, making the double-conveyor sweet potato harvester developed in this study the best with respect to damage. We will conduct additional performance tests in various growing environments to further improve the harvester for use in domestic conditions.
