

서 론
재료 및 방법
옥수수 품종
옥수수의 물리적 특성
옥수수의 역학적 특성
이산요소법
탈과 시스템 요인 선정 및 해석 조건
결과 및 고찰
옥수수의 특성 분석
옥수수의 특성을 고려한 이산요소 모델 생성
탈과부 원통 실린더의 설치 각도가 옥수수 탈과율에 미치는 영향
결 론
서 론
옥수수는 쌀, 밀과 함께 세계 3대 작물 중 하나로 용도에 따라 식용, 사료용, 공업용 등 다양한 용도로 사용된다. 서구권의 경우, 수확되는 대부분의 옥수수는 통조림 가공 공정을 거치기 때문에 수확 후 품질을 고려하지 않아도 된다. 그러나 국내의 경우 옥수수는 식용으로 사용되기 때문에 수확 후 높은 품질로 처리하는 것이 매우 중요하다(Kim et al., 2011).
식용 옥수수의 재배에서 가장 중요한 것은 상품성 확보를 위한 손상없는 옥수수를 수확하는 것이다. 그러므로 옥수수 수확기에서는 수확 시 손상이 발생하지 않도록 옥수수 특성을 고려하여 탈과 시스템을 개발하여야 하며, 다양한 요인 시험을 통하여 요인에 따른 옥수수 탈과 성능을 확인하여야 한다. 그러나 옥수수 탈과 시스템의 성능에 영향을 미치는 요인은 매우 다양하며, 요인 시험으로 성능을 평가하기에는 많은 시간과 비용이 소요된다. 농작물을 대상으로 하는 요인 시험은 수확시기에 따라 작물의 함수율이 달라질 수 있고, 시험 기간도 한정적이다. 따라서 수확시기에 실제 시험을 대체할 수 있는 농작물 모델 개발이 요구된다.
최근 컴퓨터 성능 향상으로 인하여 해석 속도와 효율이 향상되면서 시스템 설계에 필요한 다양한 요인 시험을 컴퓨터 시뮬레이션이 대체하고 있다. 기존의 이산요소법을 이용한 농작물 연구 사례를 살펴보면, Han et al.(2022)은 마늘을 대상으로 이산요소 모델의 물리적 특성을 제시하였다. 마늘을 대상으로 압축 시험, 마찰 시험 및 전단 시험(shear test)을 수행하여 이산요소 모델 생성에 필요한 변수를 도출하였고 Hertz-Mindlin 접촉 모델을 기반으로 3개의 구형입자로 구성된 마늘의 이산요소 모델을 개발하였다(Han et al., 2022). Im et al.(2022)은 마늘 파종기의 파종 성능을 향상하기 위하여 마늘을 대상으로 이산요소 모델을 개발하고, 시뮬레이션을 수행하였다. 마늘의 크기 측정과 분류를 통한 물리적 특성과 마찰 및 안식각 시험을 통해 마늘이 가지는 역학적 특성을 확인하였다. 시뮬레이션 모델의 신뢰성을 확보하기 위하여 실제 파종 시스템의 시험 결과와 비교하였으며, 검증된 모델을 이용하여 마늘의 크기에 따라 최적의 버킷 크기를 결정하였다(Im et al., 2022). Ma et al.(2022)은 콤바인의 곡물 탱크에서 쌀이 배출되는 이동 경로를 예측하기 위하여 쌀의 특성이 고려된 이산요소 모델을 생성하고 시뮬레이션을 수행하였다. 쌀에 대한 입자간 상호작용과 충돌을 고려하여 이산요소 모델을 생성하였기 때문에 배출되는 쌀의 거동을 실제와 거의 유사하게 모사하였다. 또한, 이산요소 모델의 신뢰성을 확보하기 위하여 배출 시스템을 제작하여 시험하였고, 시뮬레이션의 결과와 유사한 거동을 확인하였다(Ma et al., 2022). Lee et al.(2023)은 식용 옥수수를 대상으로 줄기의 특성을 고려하여 이산요소 모델을 개발하였다. 압축 시험 및 3점 굽힘 시험으로 옥수수 줄기의 거동을 확인하였으며, Hertz-Mindlin 접촉 모델을 이용하여 입자를 생성하였다. 메타 입자(meta-particle)을 통하여 각 입자의 좌표값을 설정하였고, 매개변수 연구(parametric study)를 통해 결합(bonding)에 필요한 변수들을 도출하였다(Lee et al., 2023). 위에 제시한 것과 같이 이산요소 모델을 이용하여 농작물의 거동을 시뮬레이션 기법으로 예측하는 연구는 다양하게 수행되었으나, 개발된 이산요소 모델을 이용하여 개발하고자 하는 시스템의 성능을 평가하고 개선하는 연구 사례는 많지 않다.
본 연구의 목적은 다양한 요인 시험을 시뮬레이션으로 대체하기 위하여 식용 옥수수에 대한 이산요소 모델을 개발하는 것이다. 또한, 개발된 이산요소 모델을 이용하여 탈과 시스템에 대한 요인 시험 시뮬레이션을 수행하고, 요인에 따른 탈과율을 비교하여 탈과 시스템의 설계 방향을 제시하는 것이다.
재료 및 방법
옥수수 품종
본 연구는 강원도 홍천에 위치한 옥수수 연구소 시험포장(GPS: coordinates N37.89936, E128.03850)에서 재배한 찰옥수수 중 미백찰 품종을 대상으로 시험하였다. 옥수수 이삭줄기의 물리적 및 역학적 특성을 확인하기 위하여 옥수수 줄기에 달려 있는 60개의 이삭을 대상으로 시험하였다. 작물은 수확시기나 환경에 의해 특성이 변화될 수 있으며, 작물이 가진 함수율이 이삭 탈과에 주요한 영향을 미치기 때문에 이삭줄기의 함수율을 최대한 보존하기 위하여 수확 시기인 2022년 8월 8일 에 탈과 시험을 수행하였다. 옥수수는 크게 옥수수 줄기와 이삭자루, 이삭으로 구성되며, 이삭자루와 이삭은 잎으로 감싸져 있기 때문에 줄기와의 각도를 확인하기 위하여 잎을 제거하였다. Fig. 1은 옥수수 이삭자루의 특성을 확인하기 위하여 감싸져 있는 잎을 제거한 시료를 나타낸 것이다.

옥수수의 물리적 특성
옥수수 이삭자루(Sub-stalk)는 옥수수 줄기(Stalk)와 이삭(Ear) 사이에 마디로 연결되어 있으며, 이삭과 함께 여러겹의 잎으로 감싸져 있다. 본 연구에서는 옥수수 작물의 이산요소 모델(Discrete Element Model)에 필요한 물리적 특성을 측정하기 위하여 디지털 각도기(BD-400W, BLUETEC, China)를 이용하여 줄기와 이삭과의 각도를 측정하였고, 버니어 캘리퍼스(Vernier calipers, Mitutoyo, Japan)와 전자저울(Electronic scale, Jay solution, Korea)을 이용하여 이삭자루와 이삭의 직경, 길이 및 무게 등을 측정하였다. Fig. 2(a)는 줄기와 이삭 사이의 각도 측정을, Fig. 2(b)는 이삭자루와 이삭을 나타낸 것이다.

옥수수의 역학적 특성
옥수수 이삭자루와 이삭의 물리적 특성을 확인한 시료를 대상으로 역학적 특성을 확인하였다. 이삭을 탈과하기 위한 지그를 제작하여 푸쉬-풀 게이지(Push-pull gauge)에 부착하여 탈과 시험을 수행하였다. 탈과 시험은 60개의 시료를 대상으로 수행하였으며, 이삭 탈과 시 줄기와 이삭이 연결된 이삭자루의 탈과에 소요되는 힘을 측정하였다. 이삭자루의 탈과 힘을 측정하기 위하여 옥수수 줄기를 손으로 고정한 후 지그를 줄기와 이삭자루 사이에 위치한 후 약 0.01 m/s의 속도로 중력 방향으로 힘을 가하였다. Fig. 3은 탈과 시험을 수행하는 사진이며, Table 1는 푸쉬-풀 게이지의 제원을 나타낸 것이다.

Table 1.
Specification of push-pull gauge
| Items | Specifications |
| Model | DSV-200N |
| Capacity, N | 200 |
| Resolution, N | 0.1 |
| Accuracy, % | 0.2 |
| Size (W × D × H), mm | 720 × 320 × 1810 |
이산요소법
이산요소법(Discrete Element Method, DEM)은 다수의 입자들의 거동을 시뮬레이션 할 수 있는 기법으로, 접촉 모델에 따라 입자의 운동학적 상태를 계산할 수 있다. 입자간의 운동학적 거동은 뉴턴 방정식과 오일러 방정식을 적분하여 입자간의 병진운동과 회전운동을 계산한다. 이산요소모델 개발은 모델링하고자 하는 대상에 맞는 접촉 모델과 방법을 사용해야 하며, 설정하는 변수값에 따라 입자간의 거동이 다르기 때문에 실제 시험 결과의 유사도를 검증해야 한다. Hertz-midlin 접촉 모델은 입자의 반지름, 결합 접촉 등이 고려되며, 입자간의 접촉에 의해 탄성 변형이 발생하는 경우 후크의 법칙(Hooke’s law)를 이용하여 접촉력을 계산한다. 또한, 입자간의 접촉력을 계산하는데 일반적으로 사용되는 접촉 모델이며, 마늘, 옥수수 등 농작물의 이산요소모델을 개발하는데 주로 사용된다(Park et al., 2021).
메타 입자(Mete-particle)는 접촉 모델로 생성한 입자의 좌표를 설정한다. 설정한 좌표는 입자 생성 시 설정한 좌표에 따라 입자의 위치가 고정된다. 결합모델은 접촉이 없는 입자들을 하나의 구조체로 구성한다. 입자들이 접촉하지 않으면 결합되지 않을 수도 있기 때문에 입자 생성 후 접촉반경은 실제 입자반경보다 크게 설정하여 결합 디스크를 생성한다(Lee et al., 2023). Fig. 4는 Hertz-Mindlin 접촉 모델의 개념도를 나타낸 것이다.

탈과 시스템 요인 선정 및 해석 조건
옥수수 수확기 요인시험 장비는 옥수수를 이송하는 이송부와 이삭을 탈과하는 탈과부로 구성되었다. 이송부는 수평 방향에서 15° 기울어져 있으며 컨베이어 벨트를 통해 이송되고, 탈과부는 2개의 원통 실린더가 수평방향으로 60°기울어져 있으며 실린더 사이 간격과 회전으로 인해 이삭이 탈과된다. 옥수수 수확기의 핵심 성능인 탈과율을 평가하기 위하여 탈과부의 원통 실린더의 각도를 주요 요인으로 선정하였다. 원통 실린더는 이송부의 컨베이어 벨트가 고정되어 있어 각도에 따라 예각, 직각, 둔각으로 위치할 수 있다. Fig. 5는 요인시험 장비와 각 파트 명칭을 나타낸 것이다.

요인시험 시뮬레이션 시 이송부의 컨베이어 속도는 0.27 m/s, 원통 실린더의 회전속도는 180 rpm으로 설정하였다. 원통 실린더의 각도는 60°를 기준으로 5°씩 증감하여 총 7수준(45°, 50°, 55°, 60°, 65°, 70°, 75°)으로 선정하였다.
결과 및 고찰
옥수수의 특성 분석
식용 옥수수의 물리적 특성을 확인하고 이산요소 모델에 필요한 역학적 특성을 확보하기 위하여 60개의 시료를 대상으로 물성 측정과 탈과 시험을 수행하였다. 착협고의 높이, 줄기와 이삭의 각도, 이삭자루의 직경, 길이, 무게 및 이삭의 직경(상단, 중단, 하단), 길이, 무게를 측정하였으며, 측정된 값들의 평균과 표준편차를 정리하였다. 또한, 탈과 시험은 매번 일정한 속도로 탈과할 수 없기 때문에 시험 중 발생할 수 있는 휴먼 에러(Human Error)를 고려하여 탈과 시 지그에 발생하는 최대 하중만 계측하였다. Table 2는 시험 결과를 정리하여 옥수수의 특성을 나타낸 것이다.
Table 2.
Properties of maize
옥수수의 특성을 고려한 이산요소 모델 생성
Altair의 EDEM 2022 프로그램을 이용하여 계측한 옥수수의 특성을 기반으로 이산요소 모델을 생성하였다. 줄기모델의 파라미터는 선행연구의 데이터를 사용하였다(Lee et al., 2023). 70 mm 길이의 줄기를 메타 입자(Meta- particle)을 통하여 2,000 mm 길이의 줄기 형상이 되도록 좌표를 설정하였고, 결합 속성(Bonding property)을 이용하여 하나의 구조체로 결합하였다. 실제 옥수수 줄기에는 여러 개의 노드(Node)가 있으며, 노드에서 잎이 생성되고 착협고의 높이에서 이삭이 생성된다. 또한 이삭자루는 여러 개의 층과 비선형적인 형상으로 성장된다. 이산요소 모델의 단순화와 해석의 효율성을 고려하여 잎은 이삭 탈과에 영향을 주지 않는다고 판단되어 제거하였고, 노드는 착협고 높이에 1개만 생성되게 모델링하였다. 이삭자루의 층수는 고려하지 않고 평균 길이와 무게로 생성하였다. 본 연구의 목적은 옥수수 이삭의 탈과를 확인하기 위한 것이기 때문에 이삭은 강체라 가정하여 직경과 길이의 평균값을 사용하였다.
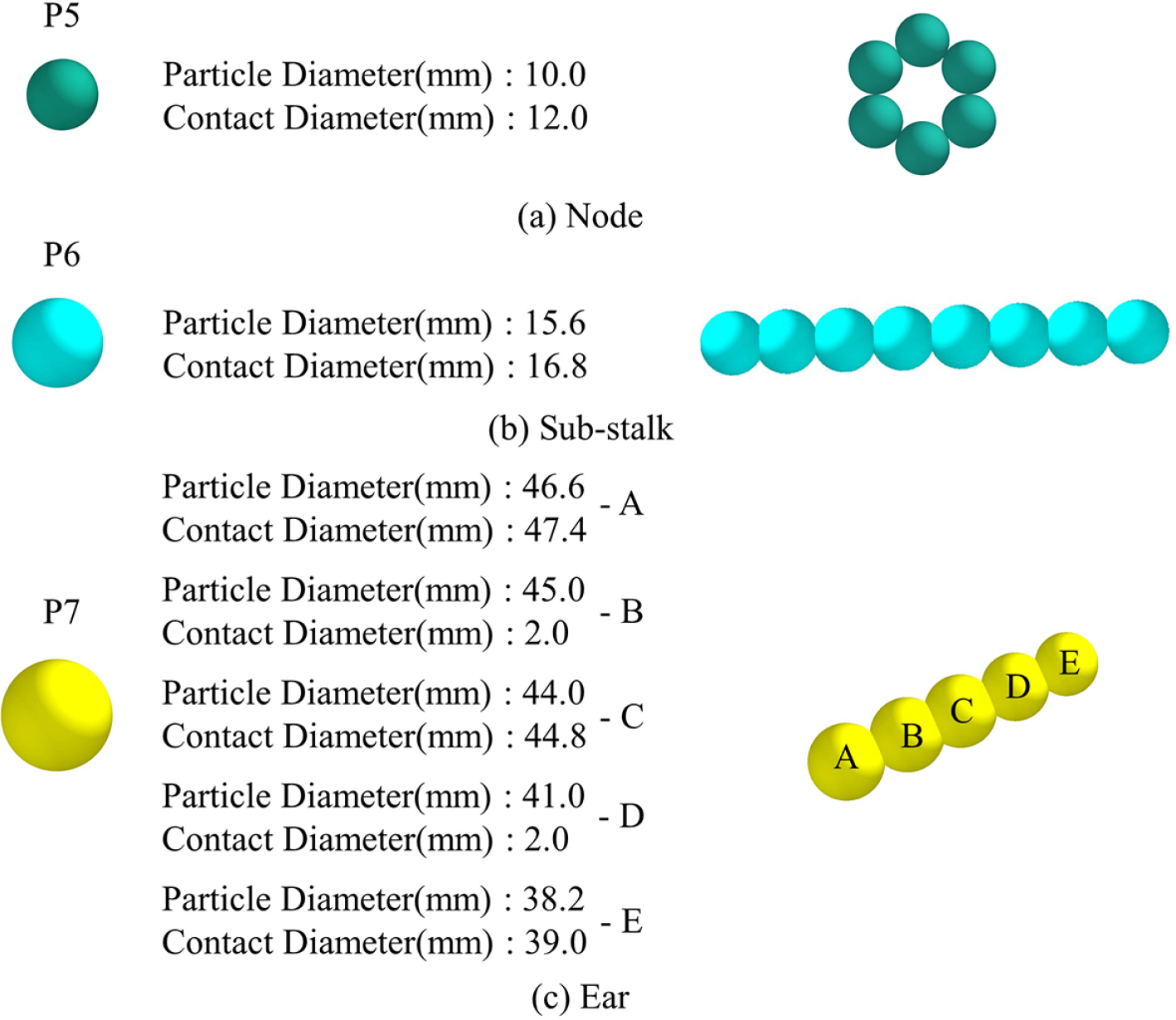
Fig. 6와 같이 옥수수 노드, 이삭자루 및 이삭의 이산요소 모델은 입자를 서로 결합하여 생성되었다. 선행연구를 통한 줄기의 모델은 4개의 입자(P1, P2, P3, P4)로 구성되어 있고, 노드를 위한 모델은 1개의 입자(P5), 이삭자루는 5개의 입자(P7-A, B, C, D, E)로 구성되어 있으며, 각 입자의 크기는 Table 2에서 측정한 평균값을 기준으로 생성하였고 각각 하나의 구조체 형상으로 설정하였다(Lee et al., 2023). 옥수수 이삭자루와 이삭의 이산요소 모델은 일직선 형태로 결합하여 생성되었다. 옥수수 줄기 이산요소 모델과 동일한 방법으로 메타 입자(Meta-particle)을 이용하여 좌표를 설정한 후 하나의 구조체로 생성하기 위하여 결합 속성(Bonding property)을 정의하였다. Fig. 7은 옥수수 줄기, 이삭자루 및 이삭의 결합을 나타낸 것이다.

이산요소 모델에서 결합모델의 특성을 결정하는 주요 변수값은 강성(Normal stiffness per unit area, Shear stiffness per unit area)과 강도(Normal strength, Shear strength)이다. 이를 결정하기 위하여 매개변수 연구(Parametric Study)를 수행하였으며, 탈과 시험 결과와 유사한 경향을 보이도록 Table 3와 같이 파라미터를 선정하여 옥수수의 특성이 고려된 이산요소 모델을 완성하였다. Fig. 6와 Table 5에서 확인할 수 있듯이 줄기와 노드(P1:P5, P2:P5, P3:P5, P4:P5), 이삭자루와 이삭(P6:P7)은 강체로 결합하였다. EDEM 프로그램에서는 강체 결합을 지원하지 않아 본 모델에서 강체에 준하는 결합 속성을 정의하였다. 시뮬레이션 모델의 탈과 시 지그는 실제 시험 속도인 0.01 m/s로 설정하였고, 중력방향으로 하강하였다. 해석 결과, 지그에 발생되는 최대하중은 72 N이었고, 시험 결과와의 오차는 1.28 N으로 약 1.75%의 오차율을 보였다. 탈과 하중에 있어서 실제 시험 결과와 유사한 경향을 보이는 이산요소 모델이 개발되었다고 판단하였다. Fig. 8은 완성된 시뮬레이션 모델을, Fig. 9은 탈과 시험에 대한 시뮬레이션 결과를 나타낸 것이다.
Table 3.
Bonding disk parameter used in study


탈과부 원통 실린더의 설치 각도가 옥수수 탈과율에 미치는 영향
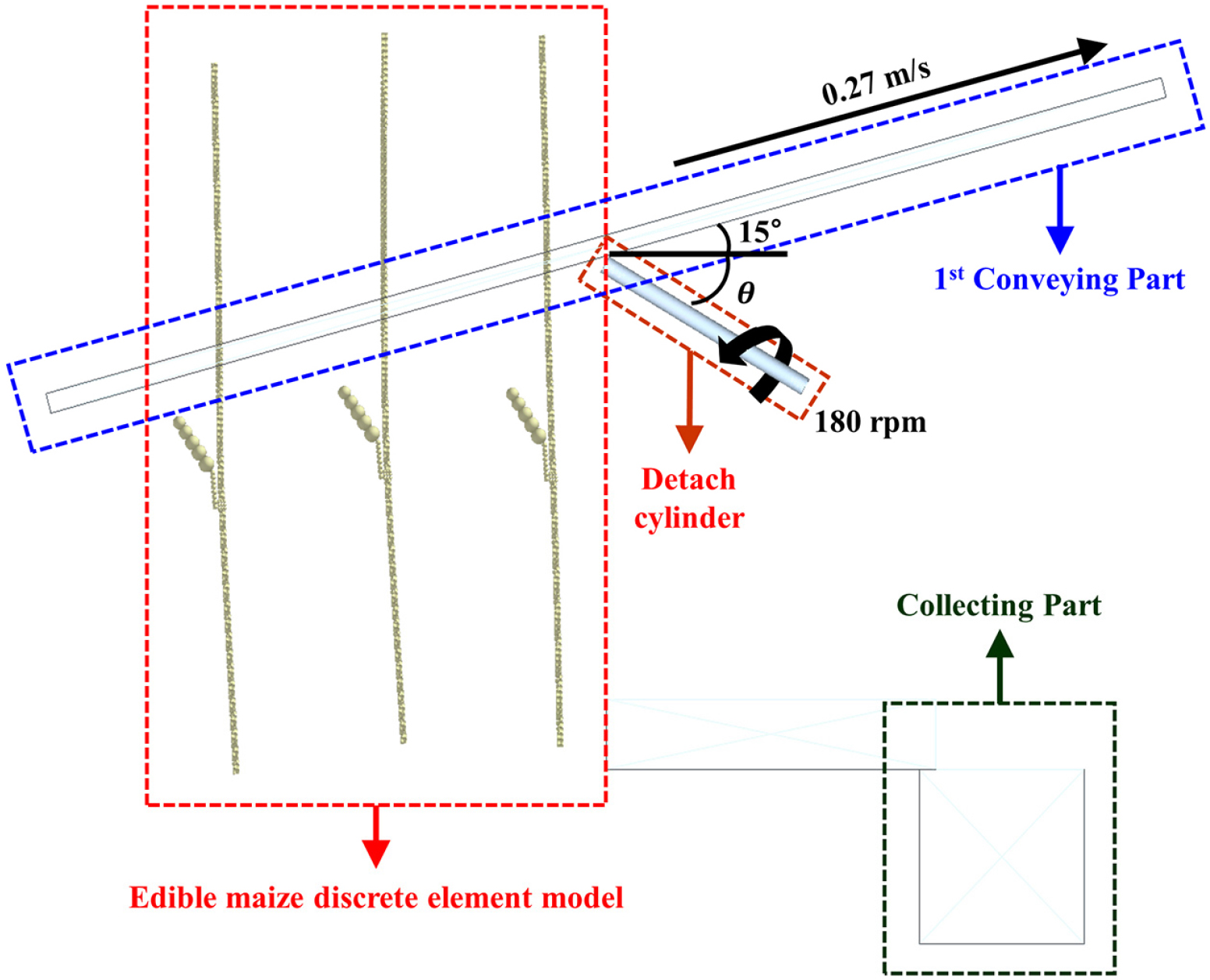
본 연구에서 탈과는 옥수수 줄기에서 옥수수 이삭을 포함한 이삭자루가 완전히 분리되는 것으로, 탈과율은 시뮬레이션에서 사용한 전체 옥수수 개체 중 탈과된 옥수수 개체의 비로 정의하였다. 옥수수 탈과율을 평가하기 위하여 EDEM 프로그램에서 제공하는 동역학 시뮬레이션 패키지인 지오메트리(Geometry)를 이용하여 이송부, 탈과부, 수집부로 구성된 옥수수 탈과 시스템을 모델링하였다.
이송부는 지오메트리에서 제공하는 컨베이어 시뮬레이션 기법(Conveyor Transition Motion)을 이용하여 고무벨트의 운동을 모사하였다. 다만, 설계된 요인시험 장비는 고무벨트의 마찰을 통하여 옥수수 줄기를 이송하였으나 시뮬레이션의 컨베이어 운동은 실제 고무벨트의 마찰을 고려하지 못하였다. 탈과부는 지오메트리에서 제공하는 회전 운동 시뮬레이션 기법(Rotation Kinematic Motion)을 이용하여 원통 실린더를 회전시켰다. 원통 실린더는 옥수수 줄기가 잘 흡입되도록 바깥에서 안으로 회전하며, 2개의 원통 실린더는 서로 반대 방향으로 회전한다. 또한, 원통실린더와 이삭의 마찰계수는 참고문헌을 인용하여 Table 4와 같이 사용하였다(Kovács and Péter, 2018). Fig. 10는 옥수수 요인시험장비 모델 구성과 해석 조건을 나타낸 것이고, Fig. 11은 시뮬레이션 상의 탈과 과정을 순서대로 나타낸 것이다.
Table 4.
Ear-Cylinder parameters used in this study
| Particle-Material interaction | Value |
| Coefficient of Restitution | 0.5 |
| Coefficient of Static Friction | 0.5 |
| Coefficient of Rolling Friction | 0.1 |

옥수수 탈과 시뮬레이션은 원통 실린더의 각도(θ)을 7 수준(45°, 50°, 55°, 60°, 65°, 70°, 75°)으로 나눠 수행되었다. 시뮬레이션 수행 결과, 원통 실린더의 각도가 65° 이하에서는 100%의 이삭 탈과율을 보였으나, 70° 이상에서는 66.6% 의 탈과율로 나타났다. Table 5는 원통 실린더의 각도에 따른 이삭 탈과율을 나타낸 것이다.
식용 옥수수 수확기의 최적의 원통 실린더의 각도를 도출하기 위하여 65°와 70° 사이의 각도를 1° 간격으로 6 수준(65°, 66°, 67°, 68°, 69°, 70°)으로 선정하여 추가 해석을 수행하였다. 시뮬레이션 결과, 66° 이상에서 미탈과된 이삭이 존재하는 것을 확인하였다. 이와 같은 현상이 발생하는 이유는 원통 실린더 각도가 66° 이상일 때 옥수수 이송부에 의해 옥수수 이삭이 탈과되기 전 탈과부를 지나치는 현상이 발생했기 때문이다.
Table 5.
Detaching rate of maize ear according to angle of detach cylinder
결 론
본 연구는 식용 옥수수 특성을 고려한 옥수수 수확기 개발을 위한 기초 연구로서, 다양한 요인 시험을 컴퓨터 시뮬레이션으로 대체하기 위하여 식용 옥수수에 대한 이산요소 모델을 개발하였다. 또한, 개발된 이산요소 모델을 이용하여 탈과 시스템에 대한 요인 시험을 수행하였고, 요인에 따른 탈과율을 비교하여 탈과 시스템의 설계 방향을 제시하였다. 식용 옥수수의 물리적 특성을 확인하기 위하여 옥수수 이삭의 각도와 무게, 직경 등을 측정하였으며, 역학적 특성을 확인하기 위하여 푸쉬-풀 게이지를 이용한 탈과 시험으로 탈과 시 발생하는 최대 하중을 계측하였다.
식용 옥수수의 이산요소 모델을 개발하기 위하여 매개변수 연구를 통하여 결합 모델에 필요한 변수를 결정하였으며, 옥수수의 물리적・역학적 특성의 시험 결과와 비교하여 개발된 이산요소 모델을 검증하였다. 또한, 탈과시스템의 탈과율에 대한 요인시험 해석을 수행하기 위하여 탈과부의 원통 실린더 각도에 따른 탈과율을 평가할 수 있는 탈과 시스템의 동역학 시뮬레이션 모델을 개발하였다.
탈과 시스템의 핵심 요인으로 탈과를 수행하는 원통 실린더 각도를 7 수준(45°, 50°, 55°, 60°, 65°, 70°, 75°)으로 설정하였다. 탈과부 원통 실린더의 각도에 따라 옥수수 탈과율에 차이가 발생하였으며, 원통 실린더의 각도가 65° 이하에서 탈과율이 우수함을 시뮬레이션 결과로부터 확인하였다. 추후 연구로 실제 시험을 통하여 원통 실린더의 각도에 따른 시뮬레이션 모델 검증을 수행하고 옥수수 수확기 탈과시스템의 기울기, 이송부 속도, 원통 실린더의 형상, 원통실린더와 이삭과의 마찰특성, 원통 실린더의 간격과 재료 등의 요인을 변화시키며 탈과시스템의 탈과 성능을 확인할 수 있을 것이다.
