

서 론
최근 농기계의 연구는 사용자의 편의성 및 안전성 확대, 기계의 성능 및 효율성의 증대, 환경 친화성 강화 등을 목표로 하고 있으며, 이는 농촌 인구의 고령화 및 환경 문제와 결부되어 그 필요성이 확대되고 있다. 기존의 엔진 방식의 농기계 사용으로 인해 발생하는 환경 문제의 심각성이 대두되면서, 최근 농기계 분야에서도 전기 구동 방식의 동력전달시스템에 관한 연구가 활발히 이루어지고 있다(Baek et al., 2020). 엔진에 비해 전기 동력원은 크기가 작고 가벼우며 소음이 적고 환경 문제가 없기 때문에 대형 트랙터 뿐만 아니라 소형 작업기에도 쓰임새가 다양할 것으로 예상된다. 이에 예초기를 비롯한 다양한 밭농업 소형 기계에서 전기 구동 방식을 적용하고자 하는 연구가 수행되고 있다.
현재 주로 사용되는 전기 동력원으로써 직류 전동기와 유도 전동기가 있다(Oh et al., 2005). 하지만 예초기와 같이 잦은 가감속으로 출력 변화가 심한 기계에 사용되는 전동기로 직류 전동기를 사용할 경우 브러시나 접촉기(Contractor)의 마모로 인해 교체의 필요성이 많으며, 과전류로 인한 불꽃이 일어날 위험성을 수반한다. 이에 유도 전동기를 사용하고자 하나 복잡한 제어와 부수적인 전력변화장치가 필요하는 등 비용이 증가하여 예초기에 사용하는 것이 적합하지 않다(Miller, 2004).
가정용 기기 및 전동 기기 등에서의 전기 동력원 개발은 저가 및 고효율 브러시리스 모터의 연구를 토대로 더욱 확장되고 있다. 또한, 신뢰성, 안정성, 동작 수명 및 소음 등의 이유로 브러시 및 정류자가 없는 모터 개발이 산업체에서 활발히 이루어지고 있는 실정이다. 스위치드 릴럭턴스 전동기(Switched Reluctance Motor, SRM)는 간단한 모터 구조, 브러시리스 동작, 회전자에 자석이 없고 권선만 있는 구조 등의 이유로 여러 분야에 적용할 수 있는 가격 경쟁력과 고성능을 가진다(Ha, 2009).
SRM은 넓은 범위의 속도 및 토크에서 효율이 높고, 단위 체적당 토크 및 출력 증가, 속도 및 토크 제어, 역방향 운전 및 회생제동이 용이하다는 장점으로 인하여 전기자동차, 전동 지게차 등에 사용되던 기존 모터들의 대용품으로 관심을 모으고 있다(Jung, 2014). 또한 SRM은 비희토류 전동기로서 내구성 및 내환경성이 뛰어나기 때문에 건설기계 혹은 농기계에 적용이 가능하다(Jeong et al., 2014). 이에 본 논문에서는 직류전동기와 출력특성이 유사하고 기계적 단점이 적은 SRM를 예초기용 전기 동력원으로 선정하고, 예초기 사양에 적용 가능 여부를 확인하고자 한다. 또한 권선사양에 대한 특성 해석을 수행하여 요구조건을 만족하는 자극(Pole)당 턴수 및 권선 제작 방법을 제시하고자 한다.
재료 및 방법
SRM 사양
예초기에 적용하기 위한 SRM은 약 15,000 rpm에서 약 300 W의 정격용량을 갖는 것으로 제시되었다. 이에 상용품이 아닌 두 개의 모델을 제시하고 예초기 적용 가능성을 검토하고자 한다. Table 1은 두 개의 회로 모델의 정격 사양 및 권선 사양을 정리한 것이다. 모델은 SRM에서 주로 사용하는 2병렬 회로 모델과 4병렬 회로 모델을 대상으로 선정하였다.
Table 1.
Analysis of the model definition and specifications
SRM 이론
Fig. 1은 SRM의 이론과 구동원리 설명을 위한 모터의 정렬 및 비정렬 위치를 정의를 표현한 것이다. 위치 정의는 직접 계측이 가능한 기계각과 입력 전압 혹은 전류의 1주기를 표현하는 전기각으로 정의하게 되는데, 정렬시 기계각은 0°이며 전기각은 기준 위치로, 12시 방향의 회전자 자극이 고정자 자극과 가장 가까워 공극이 가장 작기 때문에 0°가 되며 인덕턴스는 최대가 되다. 비정렬시 기계각은 22.5°이며 이때 전기각은 회전자 자극과 고정자 자극이 가장 먼 상태인 180°가 되며 인덕턴스는 최소가 된다.
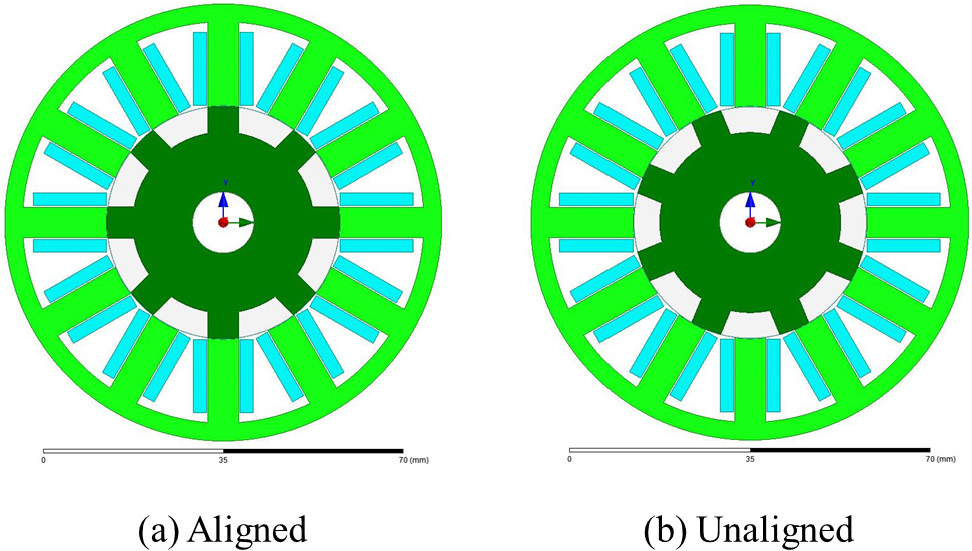
Fig. 2은 스위칭 각도에 따른 상전류와 인덕턴스 프로파일을 나타낸다. 상전류는 인가전압, 속도, 스위칭 각도, 인덕턴스 프로파일 등의 운전조건에 따라 변화되고 이로 인하여 인덕턴스도 자기포화 특성을 갖게 되므로, 비선형적인 특성을 갖게 된다. 이러한 상호 관계는 식 (1)로 표현된다.
여기서, 은 1상의 저항, 은 회전자 위치(𝜃)와 전류()의 함수로 표현되는 인덕턴스 프로파일, 은 회전 각속도를 각각 나타낸다.
SRM에서 에너지의 변환은 Fig. 2에서 토크 발생구간()과 전류 소호구간() 동안의 토크()로 정의하며, 식 (2)와 같다. 또한, SRM 의 출력 토크, 에너지 변환율 등의 모든 특성이 기자력과 인덕턴스에 의해 결정되므로, 회전자 위치각과 기자력에 대한 인덕턴스가 매우 중요한 설계 변수가 된다.
Fig. 2에서 는 구동 드라이버의 스위치가 가동되는 구간이며, 도통각(Dwell angle, )이라 한다. 은 최대 인덕턴스가 발생하기 시작하는 각도이며, 최대 인덕턴스 구간은 고정자 자극과 회전자 자극의 폭의 차이에 의해 발생한다. 최대 인덕턴스 구간은 인덕턴스 감소 구간에서의 부(-)토크 발생 크기를 감소시키기 위해 별도의 설정이 필요하다. 는 구동 드라이버의 스위치 가동 시작 각도()에 따른 전류 파형의 패턴을 개념적으로 나타내며, 의 위치에 따라 전류 상승 구간()에서의 과도 특성이 달라진다.
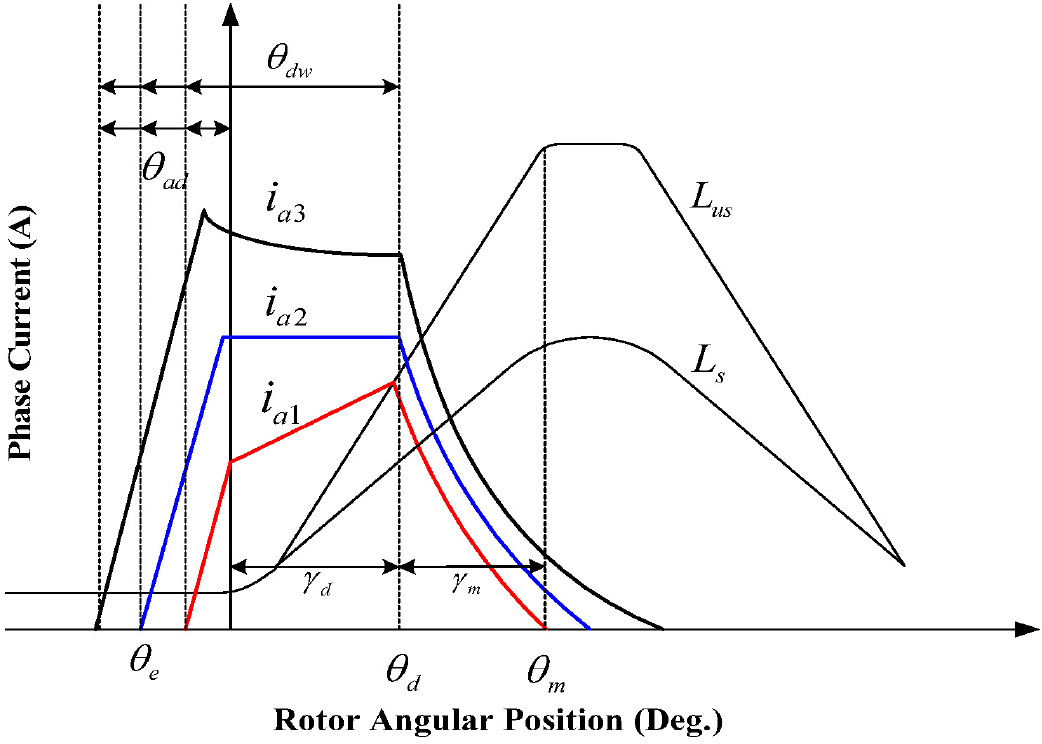
Fig. 3은 상전류와 인덕턴스에 의한 자속의 쇄교 특성을 나타내며, 이는 자기회로와 인버터 기준 평활 전류인 에 대한 에너지 변환궤적을 표현하고 있다. 는 비정렬 상태 에서의 자속 쇄교수이고, 는 최대 중첩시(완전 정렬시)의 위치각 에서의 자속 쇄교수를 상전류에 따라 나타낸 결과이다. 운전시 부토크의 발생을 방지하기 위하여 상전류의 소호 시간을 고려하여 정렬시의 위치각 보다 앞서 스위치의 전원이 꺼지게 되는데, 이때 철심의 감자 특성은 곡선 처럼 나타나게 된다. 그러나, 이처럼 비선형적인 자속의 쇄교 특성은 해석에 어려움을 수반하게 하므로, 곡선의 자속 변화는 점 까지는 직선 와 평행한 직선 와 같이 변화하며, 점 이후부터는 포화 되지 않은 최대 정렬 위치인 의 공극만의 인덕턴스 를 따라 선형적으로 감자된다고 근사화한다. 포화 여부는 그래프의 직선의 기울기가 급격하게 변하는 지점으로 확인할 수 있다. 이와 같이 SRM 에서는 철심의 포화를 이용한 출력에너지 의 최대화가 설계의 주안점이 되므로, 인가전류의 제한치 안에서 적절한 철심의 포화를 활용하는 것이 중요하다.
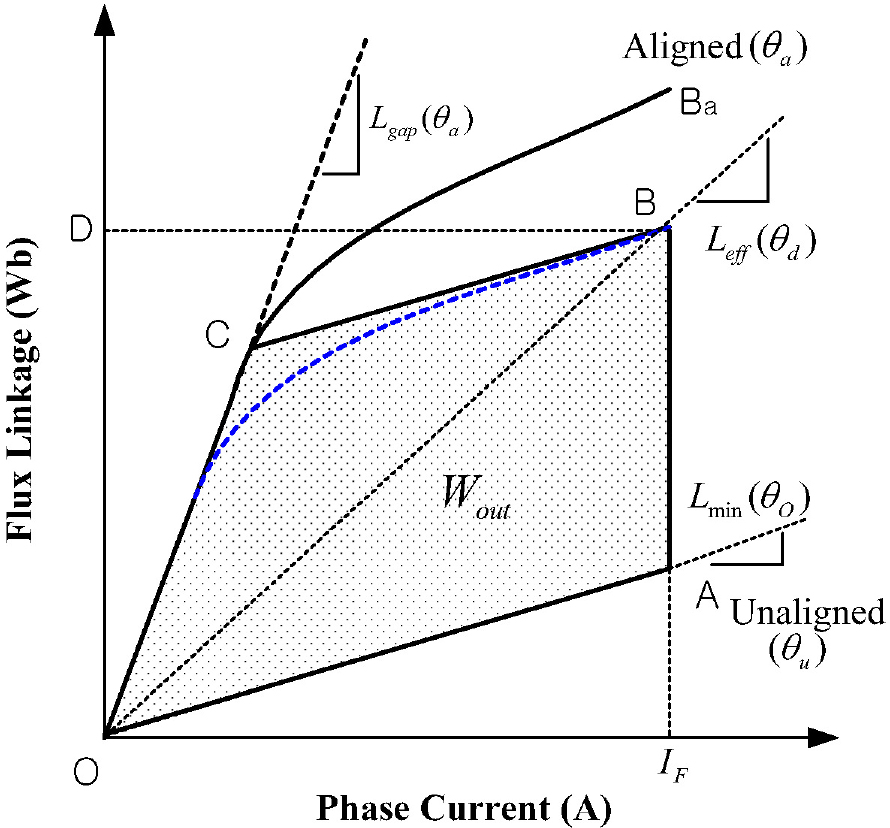
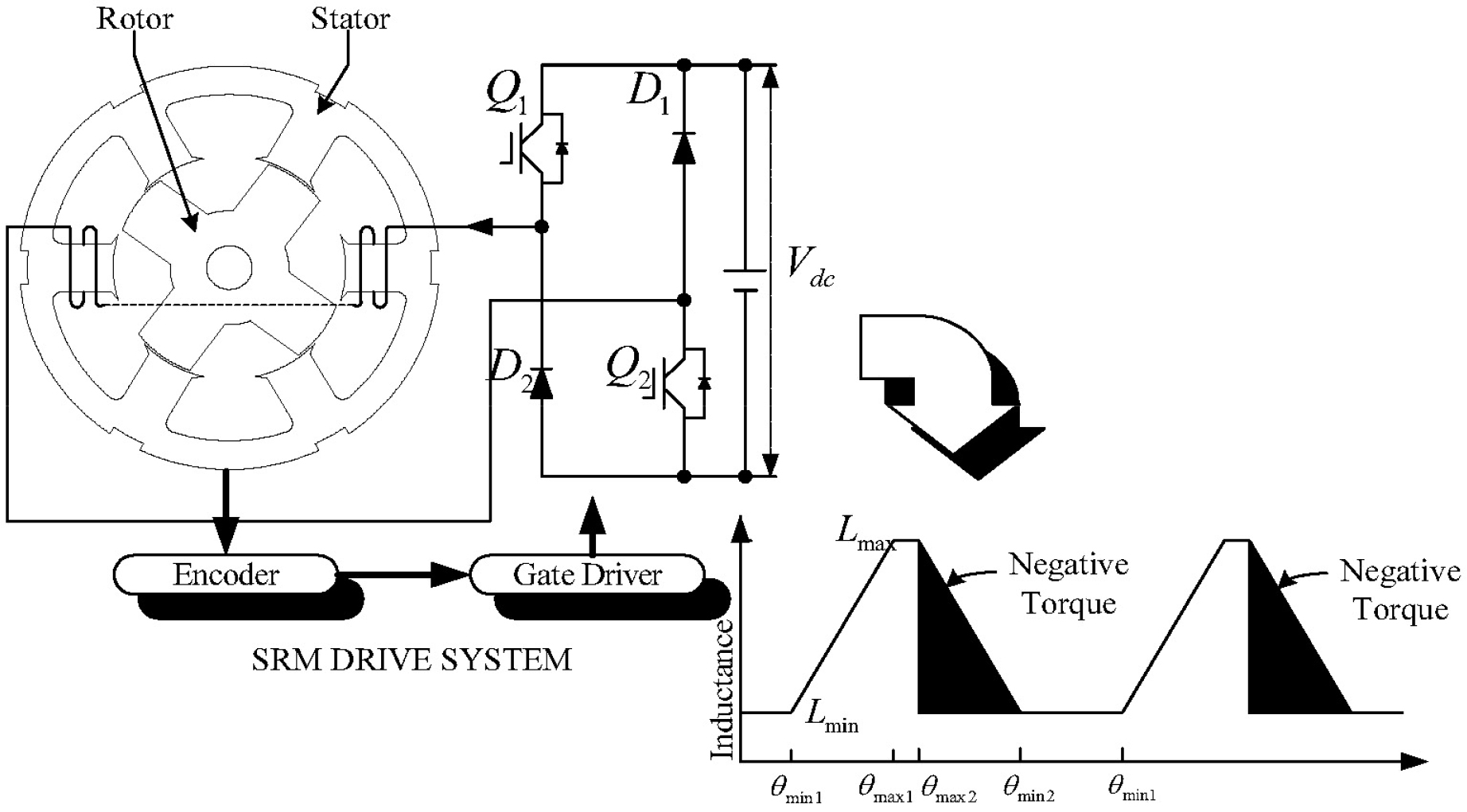
Fig. 4는 SRM의 1상 구동 회로와 인덕턴스 프로파일에서 정(+)토크의 발생 원리를 나타낸다. SRM의 구동 시 회전자의 위치에 따라 변화하는 인덕턴스 프로파일과 실제 회전자의 위치와의 관계는 엔코더에 의해 계측되며, 정토크 구간에서 SRM이 정상 구동할 수 있도록 스위칭 펄스 발생 회로(Gate Drive)로 인가된다.
결과 및 고찰
2병렬 회로 모델(모델 1)과 4병렬 회로 모델(모델 2)의 특성 해석 결과를 제시하고 분석하였다. SRM의 정특성 및 동특성 해석 결과의 도출을 위해 상용 프로그램인 Ansys Maxwell RMxprt와 EM 2D를 사용하였다.
정특성 해석 결과
Fig. 5은 모델 1의 (상전류 vs. 쇄교자속) 특성 곡선을 나타낸다. 모델 1은 정렬 위치에서 약 8 A 정도의 전류에서 철심 포화가 일어남을 확인할 수 있다. SRM에서는 자속의 포화를 활용하여 에너지의 활용도를 높이는 것이 매우 중요한 만큼, 현재 설계된 기기에서는 철심의 포화를 발생시키는 전류의 크기가 정격 전류보다 약 43% 정도 크므로 에너지 활용률이 상대적으로 작은 기기라 할 수 있다. Fig. 6은 모델 2의 특성 곡선을 나타낸다. 모델 2는 정렬 위치에서 약 16A 정도의 전류에서 철심 포화가 일어남을 확인할 수 있다.
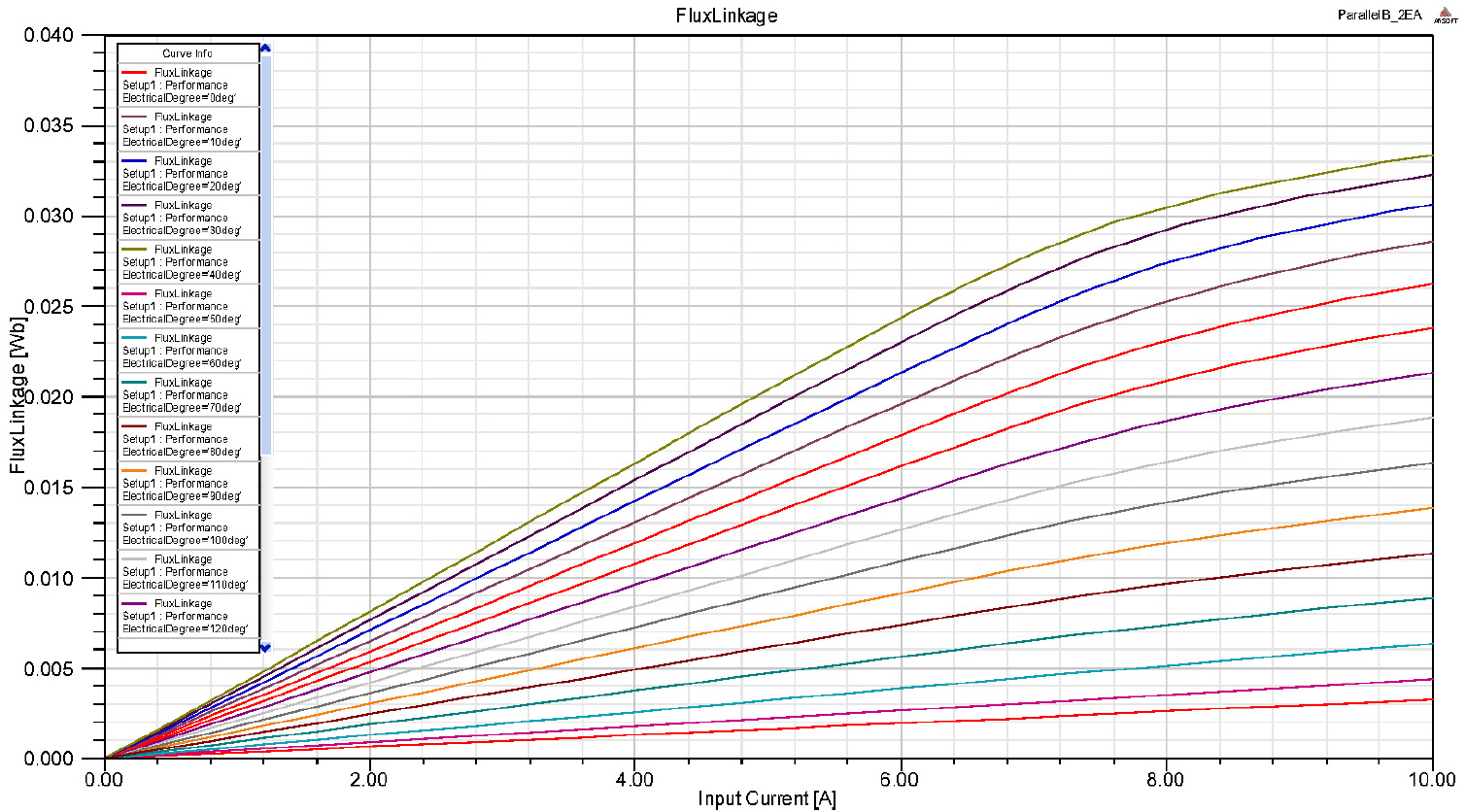
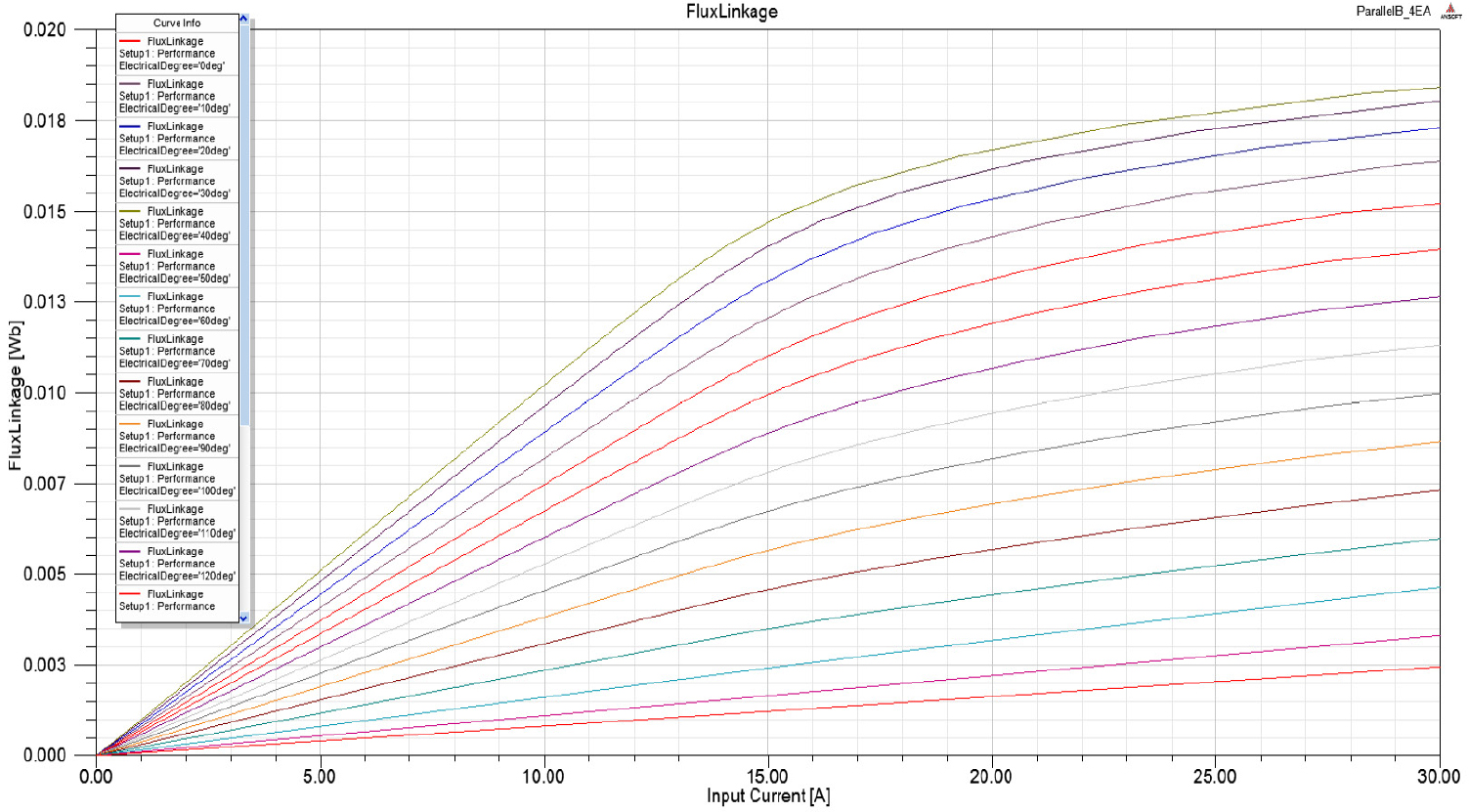
Fig. 7은 모델 1의 전류의 크기 변화에 따른 1-상 쇄교자속 크기의 변화를 나타낸다. 약 7 A까지는 선형적 쇄교자속의 변화를 확인할 수 있으나, 약 8 A에 가까운 전류값에서 철심의 포화로 인한 쇄교자속량의 증가폭이 줄어들고 있음을 확인할 수 있다. Fig. 8은 모델 2의 전류의 크기 변화에 따른 1-상 쇄교자속 크기의 변화를 나타낸다. 약 14 A까지는 선형적 쇄교자속의 변화를 확인할 수 있으나, 약 16 A에 가까운 전류값에서 철심의 포화로 인한 쇄교자속량의 증가폭이 줄어들고 있음을 확인할 수 있다.
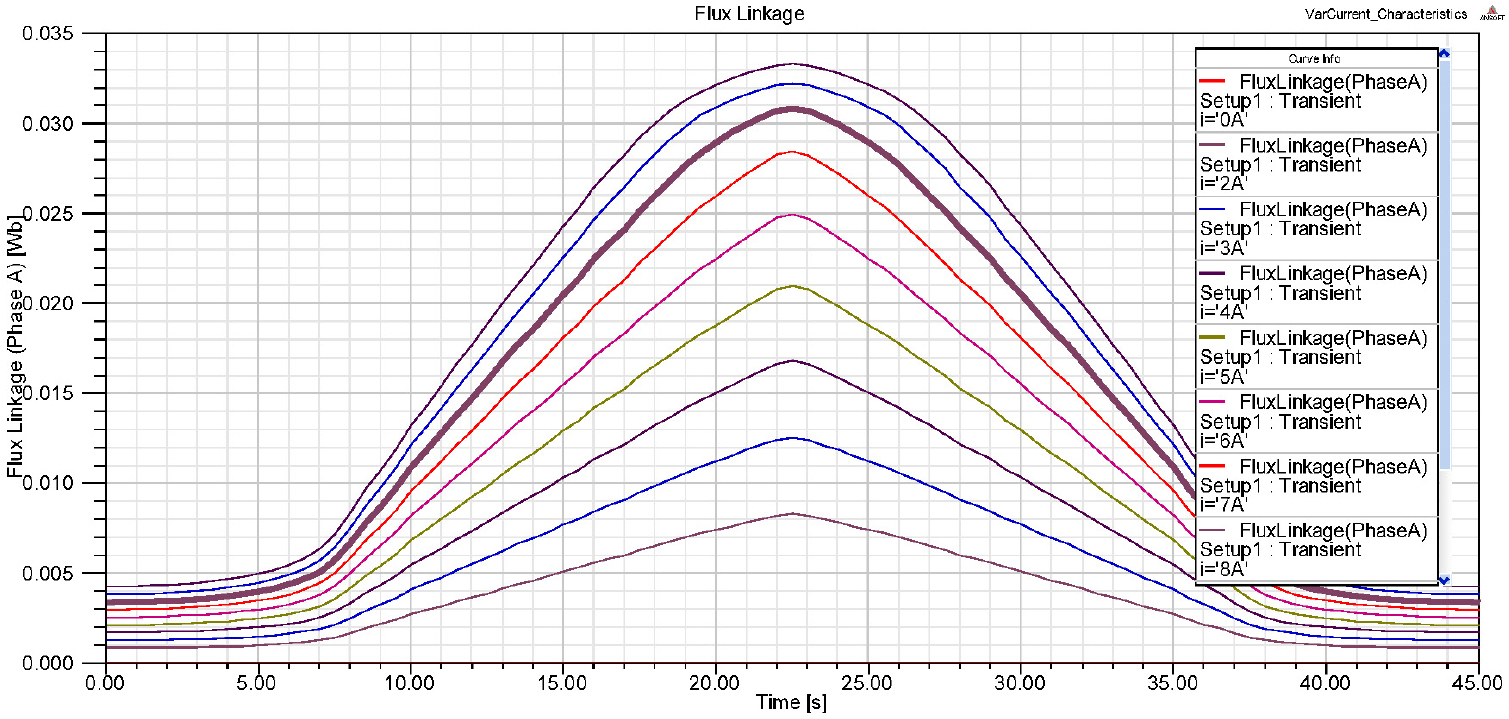
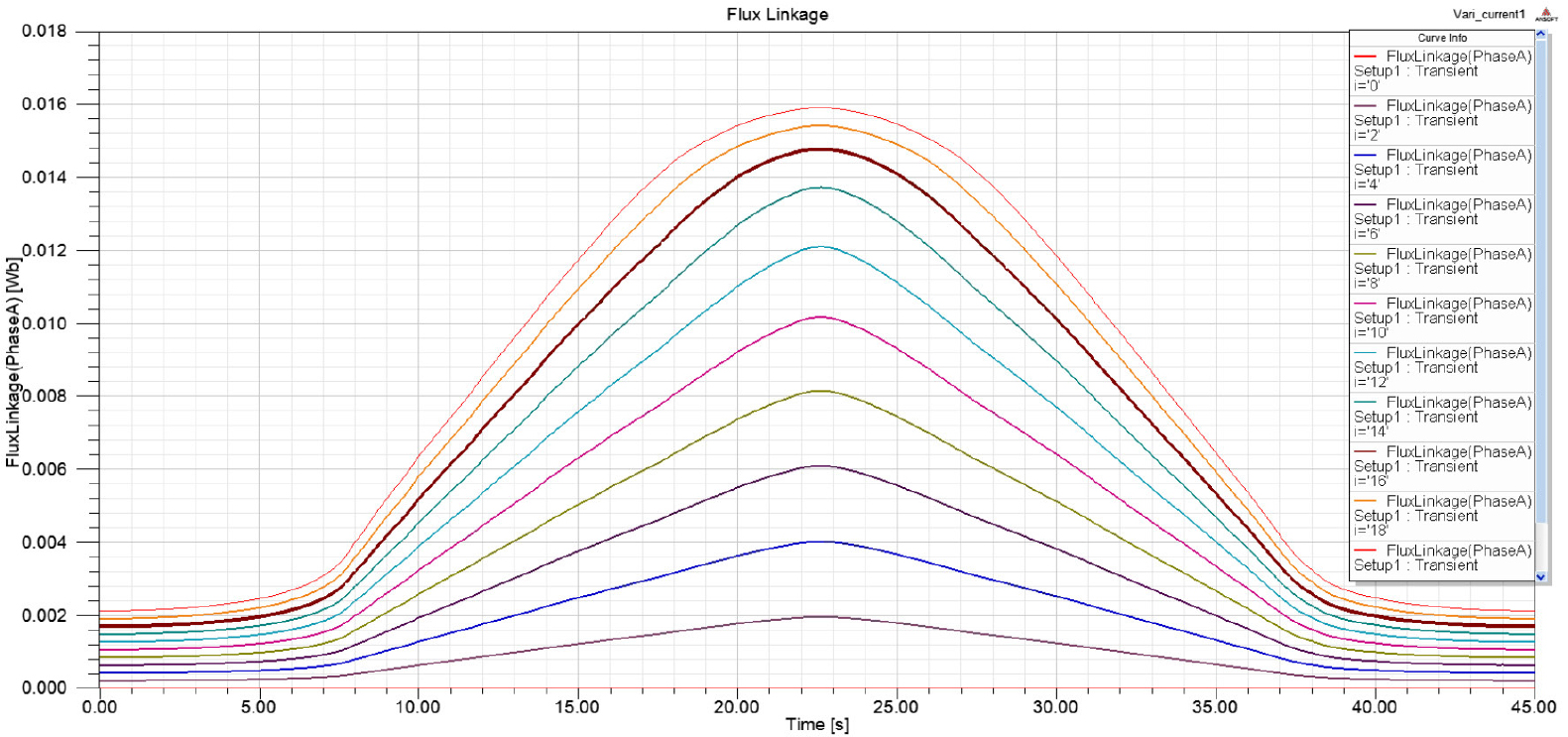
Fig. 9은 모델 1의 전류의 크기 변화에 따른 1-상 쇄교자속 크기의 변화를 나타낸다. 약 7 A까지는 선형적인 쇄교자속 크기의 변화를 확인할 수 있으나, 약 8 A에 가까운 전류값에서 철심의 포화로 인하여 쇄교자속량의 증가폭이 줄어들고 있음을 확인할 수 있다. Fig. 10은 모델 2의 전류의 크기 변화에 따른 1상 쇄교자속 크기의 변화를 나타낸다. 약 14 A까지는 선형적 쇄교자속 크기의 변화를 확인할 수 있으나, 약 16 A에 가까운 전류값에서 철심의 포화로 인한 쇄교자속 크기의 증가폭이 줄어들고 있음을 확인할 수 있다.
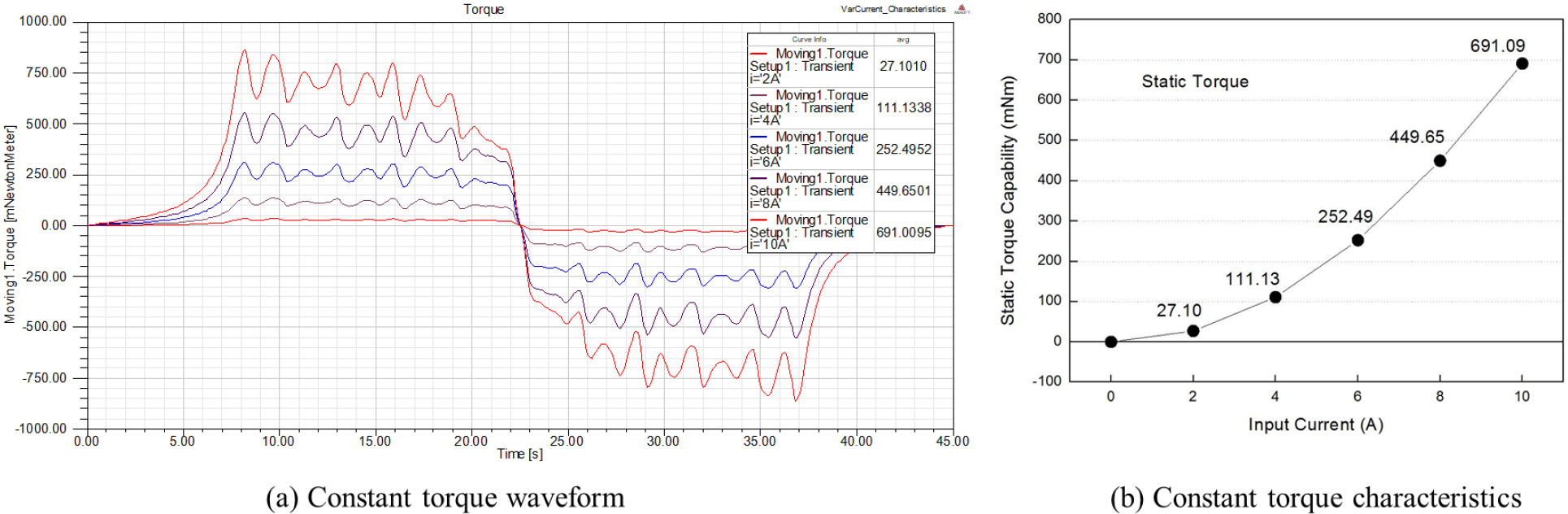
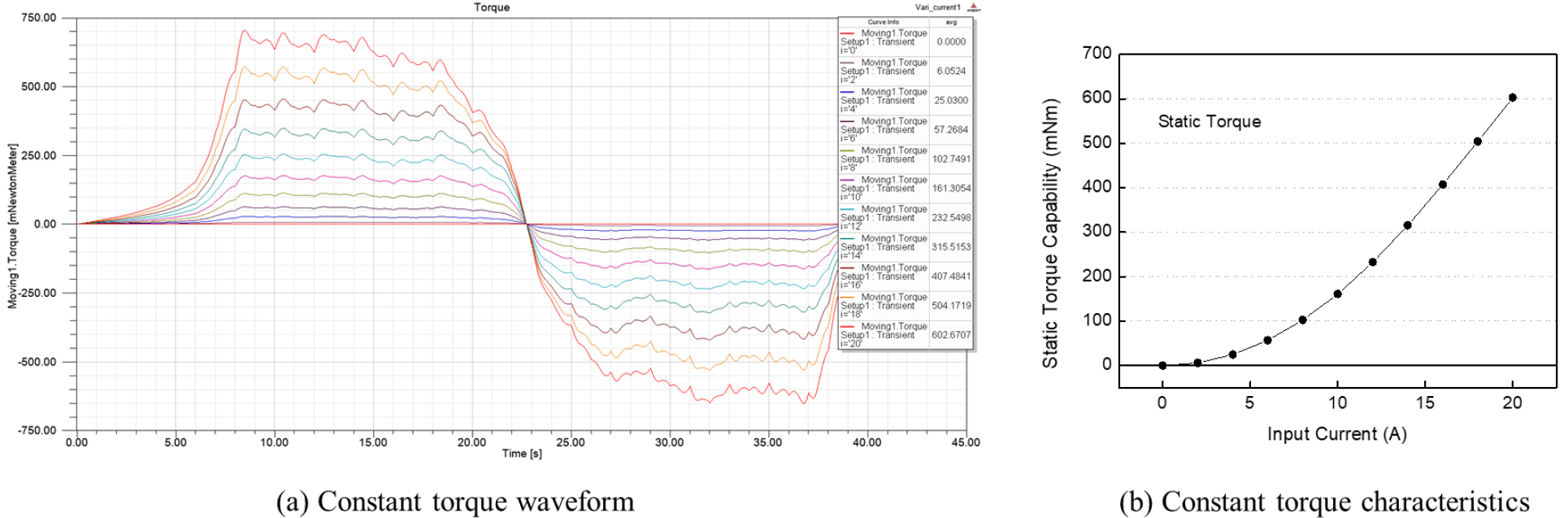
Fig. 11은 모델 1을 대상으로 한 상에 8 A의 전류 인가시 고정자 및 회전자 철심에서의 자속밀도 분포를 보여준다. 회전자가 완전 정렬상태일 때, 5 A에서 고정자 철심의 최대값은 약 1 T 미만인 것으로 나타났으며 한 상에 8 A의 전류를 인가하였을 경우 고정자 철심의 최대 자속밀도는 약 1.6 T 정도로 나타났다. 이는 적용된 적층 규소강판의 포화영역에 해당한다.
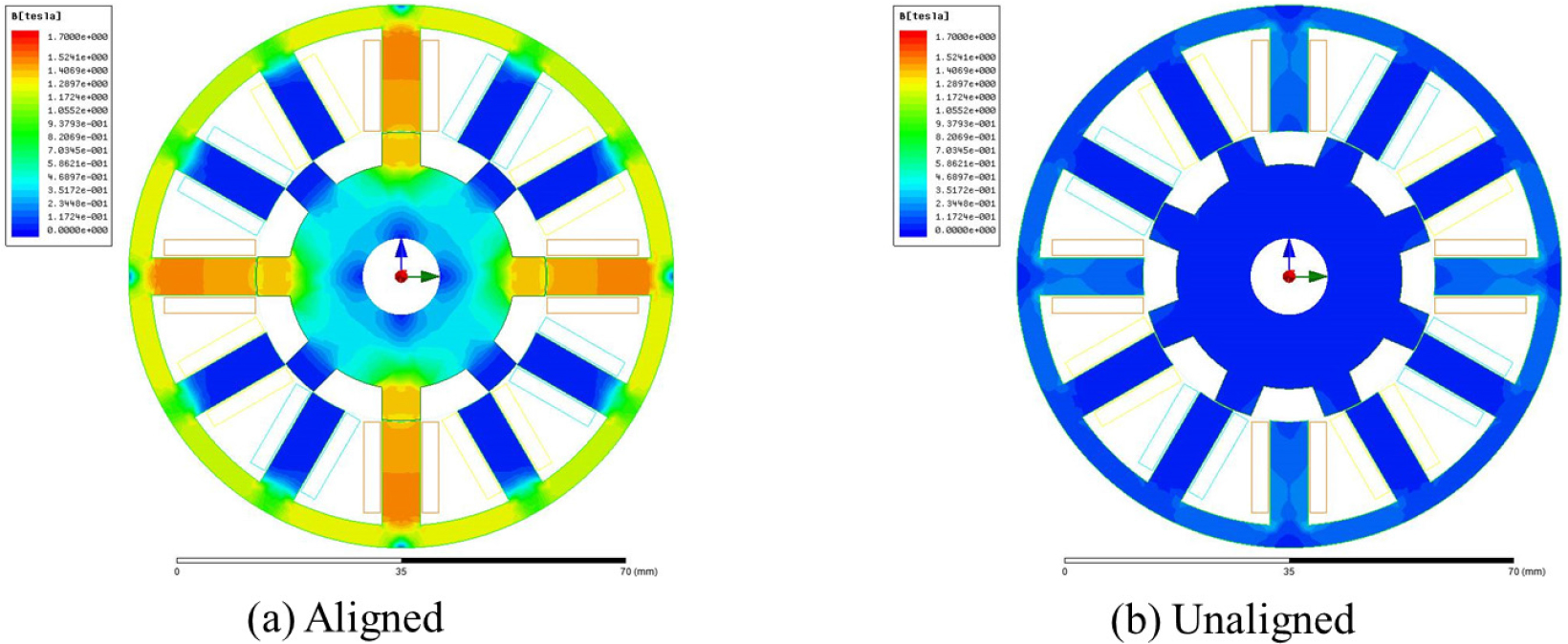
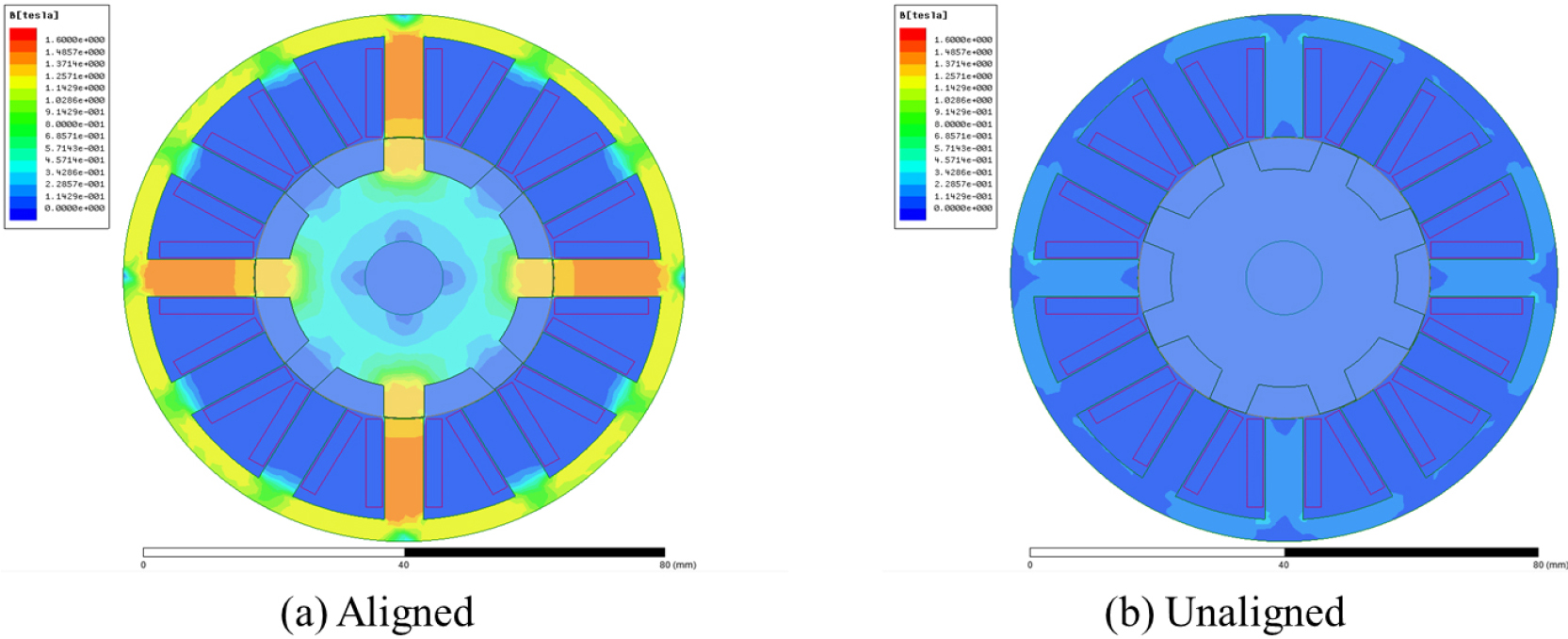
Fig. 12은 모델 2을 대상으로 한 상에 16 A의 전류 인가시 고정자 및 회전자 철심에서의 자속밀도 분포를 보여준다. 회전자가 완전 정렬상태일 때, 5 A에서 고정자 철심의 최대값은 약 0.6 T 미만이었으며, 한 상에 10 A의 전류를 인가하였을 경우 고정자 철심의 최대 자속밀도는 약 1.0 T 정도로 나타났다. 또한 한 상에 16 A의 전류를 인가하였을 때 고정자 철심의 최대 자속밀도는 약 1.5 T 정도이며, 적층 규소강판이 포화영역에 도달한 것을 확인할 수 있었다.
출력 특성 곡선
등가자기회로 해석기법을 적용하여 기기의 성능을 계산하는 상용 프로그램인 Ansys Maxwell RMxprt를 이용하여 출력 특성 곡선(Output characteristics curves)을 도출하였다. Fig. 13는 각 모델의 속도-토크 특성 곡선을 나타낸다. 모델 1은 설계 사양인 300 W 출력에 해당하는 2,736 rpm에서 약 1.07 Nm, 약 15,000 rpm에서 0.05 Nm의 출력 토크를 확인하였으며, 모델 2는 300 W 출력에 해당하는 15,000 rpm에서 약 0.19 Nm의 출력 토크가 나타났다.
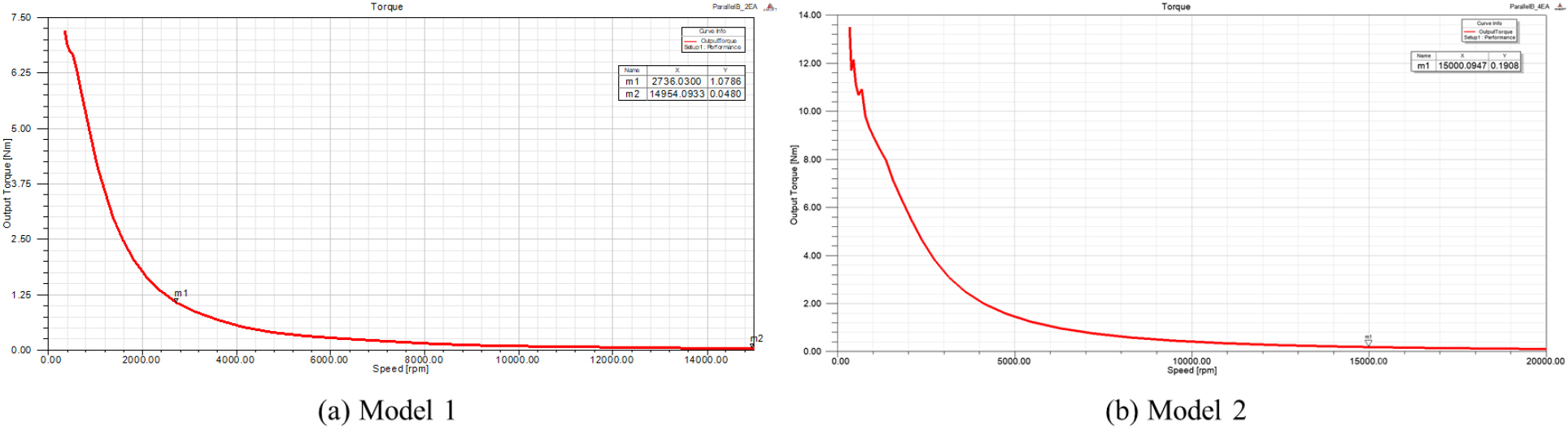
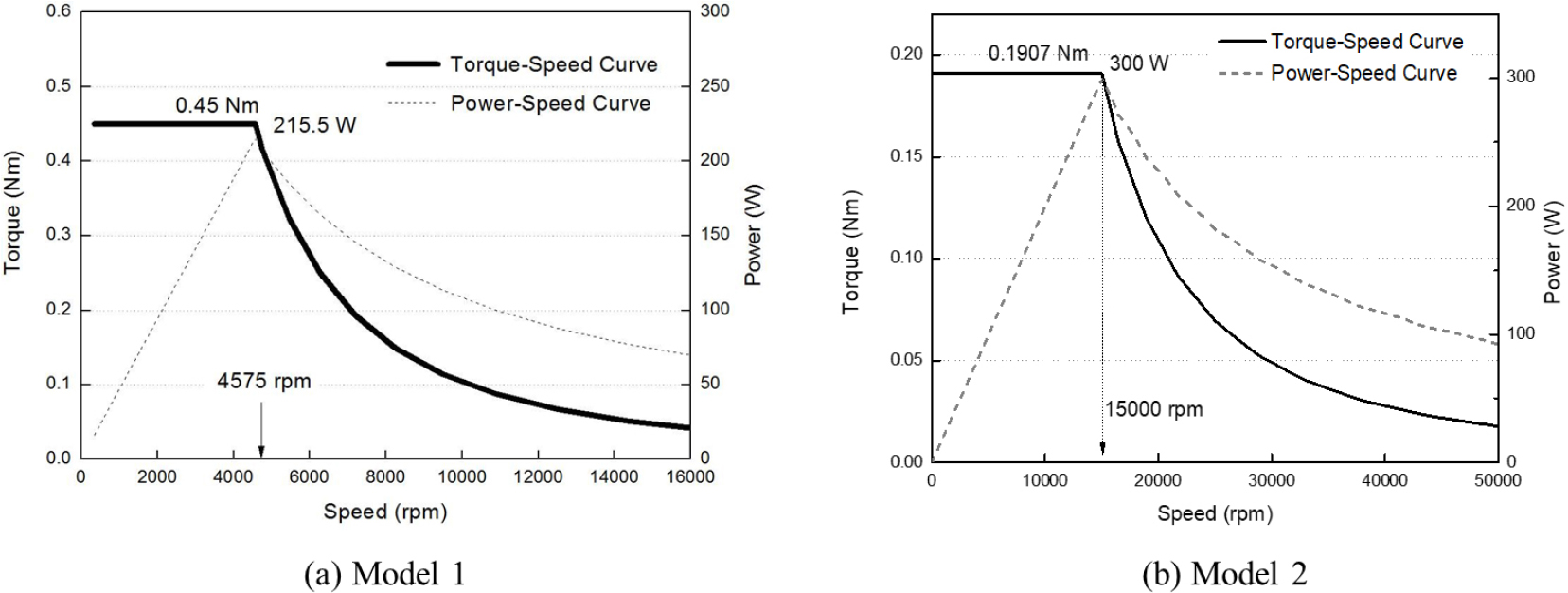
Fig. 14는 속도-효율 특성 곡선을 각각 나타낸다. 모델 1은 300 W의 출력을 갖는 2,743 rpm에서 약 74.5% 의 효율을 갖는 것을 Fig. 14(a)를 통해 확인할 수 있으먀, 15,000 rpm에서 약 75 W의 출력을 가질 때 효율을 약 94% 정도를 가질 수 있다. 하지만 Fig. 9의 정토크 특성에서 확인할 수 있듯 모델 1의 전류 제한치는 약 8 A 정도이므로, 기동시부터 전류의 제한을 통한 8A-0.45 Nm 조건에서 운전을 할 경우, 모델 1 SRM의 속도-토크 특성곡선은 Fig. 15(a)와 같이 추정될 수 있으며, 그림과 같은 속도-토크 특성을 가질 경우 SRM의 최대 출력은 4575 rpm에서 약 215 W 정도이다. 속도-토크 특성 해석 결과, 시스템 요구 사양인 300 W 15,000 rpm을 만족하지 못하므로 모델 1인 2병렬 회로 모델은 예초기용 SRM으로 사용하기 어렵다.
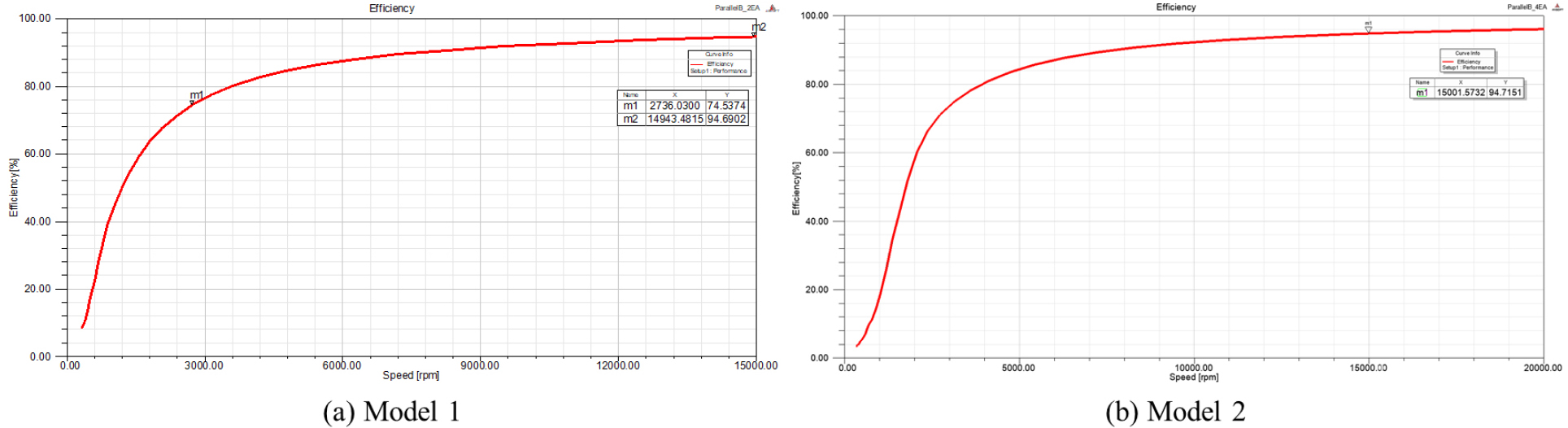
모델 2는 Fig. 14(b)를 통해 300 W의 출력을 갖는 15,000 rpm에서 약 94.7% 정도의 효율을 확인할 수 있다. 하지만 Fig. 10의 정토크 특성에서 확인할 수 있듯 모델 2의 전류 제한치는 약 16 A 정도이므로, 기동시부터 전류의 제한을 통한 0.1907 Nm 조건에서 운전을 할 경우, 모델 2 SRM의 속도-토크 특성곡선은 Fig. 15(b)와 같이 추정할 수 있다. 그림과 같은 속도-토크 특성을 가질 경우 SRM의 최대 출력은 15,000 rpm에서 약 300 W 정도이다. 모델 2는 시스템의 요구 사양을 만족하기 때문에 모델 2인 4병력 회로 모델은 예초기용 SRM으로 사용하기 적합하다.
정상상태 특성
모델 2가 목표 사양을 만족하였기 때문에, 모델 2 SRM만을 대상으로 정상상태 특성 분석을 수행하였다. 정상상태 특성 분석을 위해 Fig. 16와 같은 하드쵸핑(Hard-Chopping) 방식의 스위칭 구동 형태를 인가하였다. 하드쵸핑은 전압을 양의 방향과 음의 방향을 모두 활용하는 방식으로, 양의 방향 전압만 활용하는 소프트쵸핑 방식과 비교할 수 있다. 스위칭 리드각은 30°이며 펄스폭은 90°이다.
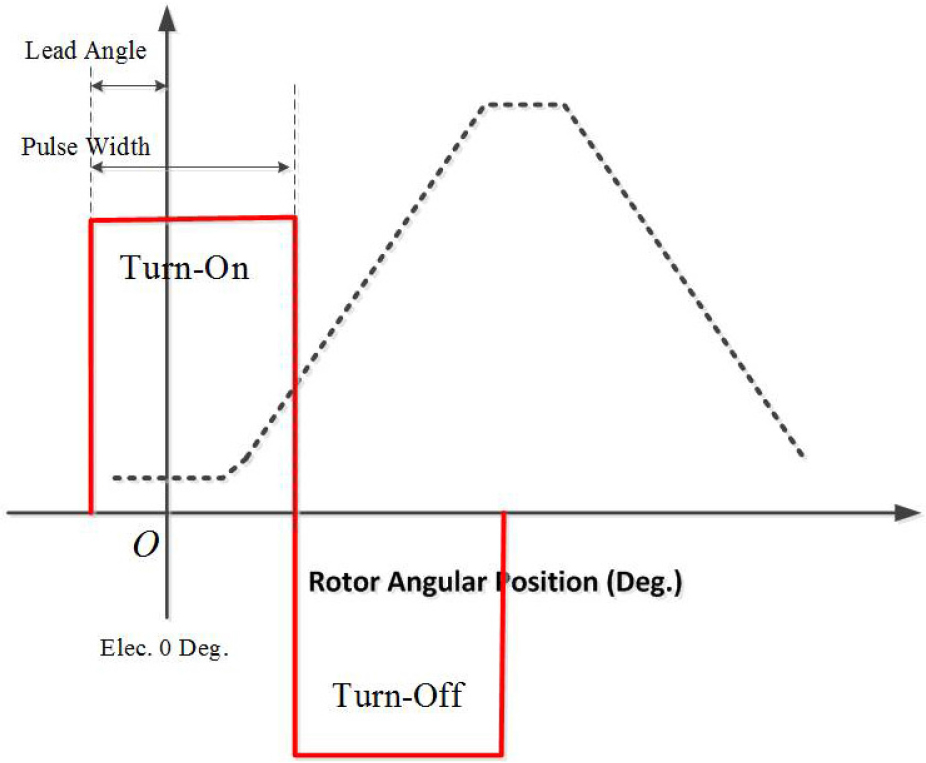
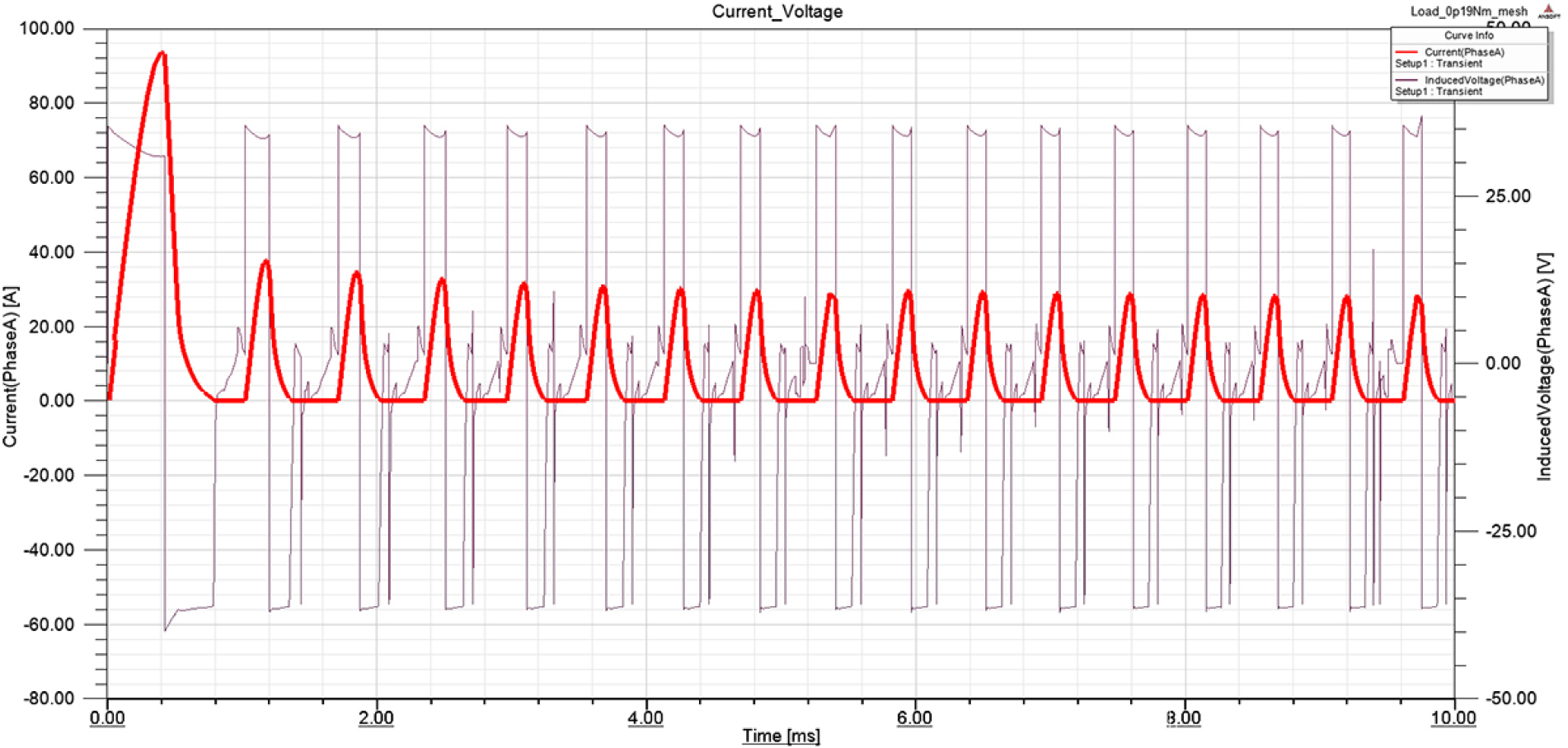
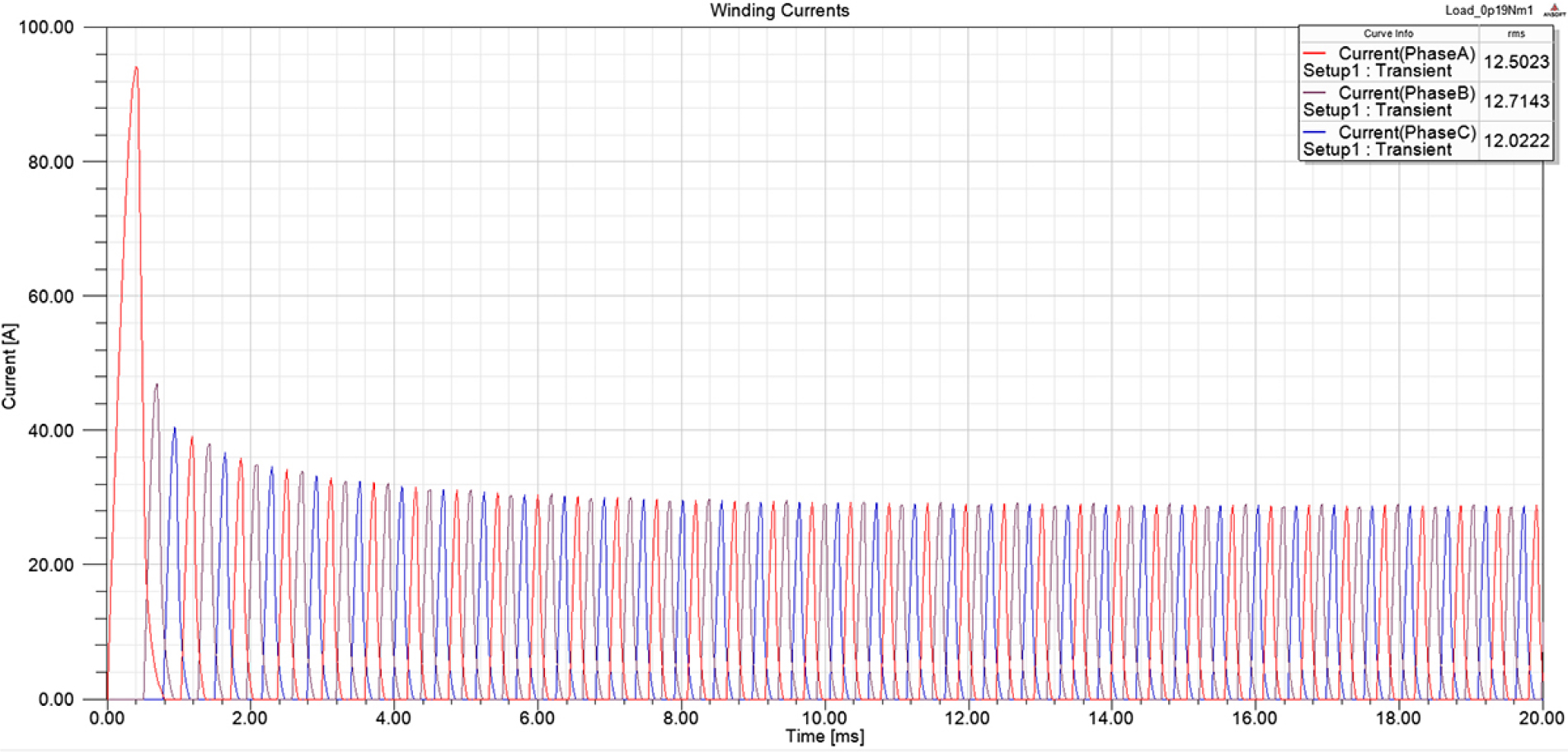
Fig. 17은 모델 2 SRM의 인덕턴스 프로파일과 입력 전압의 전기각에 따른 스위칭 ON-OFF 구간을 보여주며, Fig. 18은 약 0.19 Nm의 부하가 인가된 상태에서 SRM의 과도-정상상태 구동시 입력 전압 및 전류 인가 파형을 보여준다. 스위칭 전압의 인가는 Fig. 15에서 제시한 절대위치에서 ON-OFF 하여 구동하였다. 36 Vdc 전압이 ‘+’, ‘-’ 방향으로 인가되어 전류의 확립 및 소호를 빠르게 수행하고 있으며, 전류는 약 12 Arms가 인가된다. Fig. 19은 각 상으로 인가되는 전류의 파형을 각각 나타낸다.
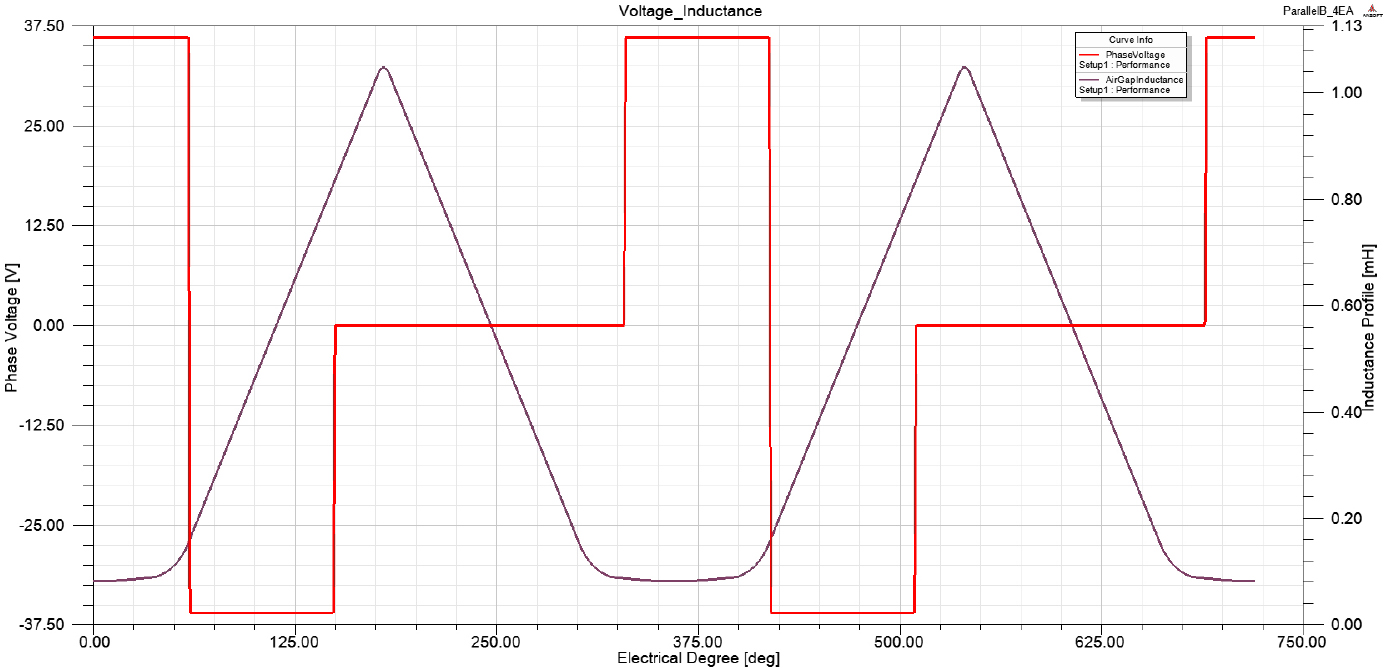
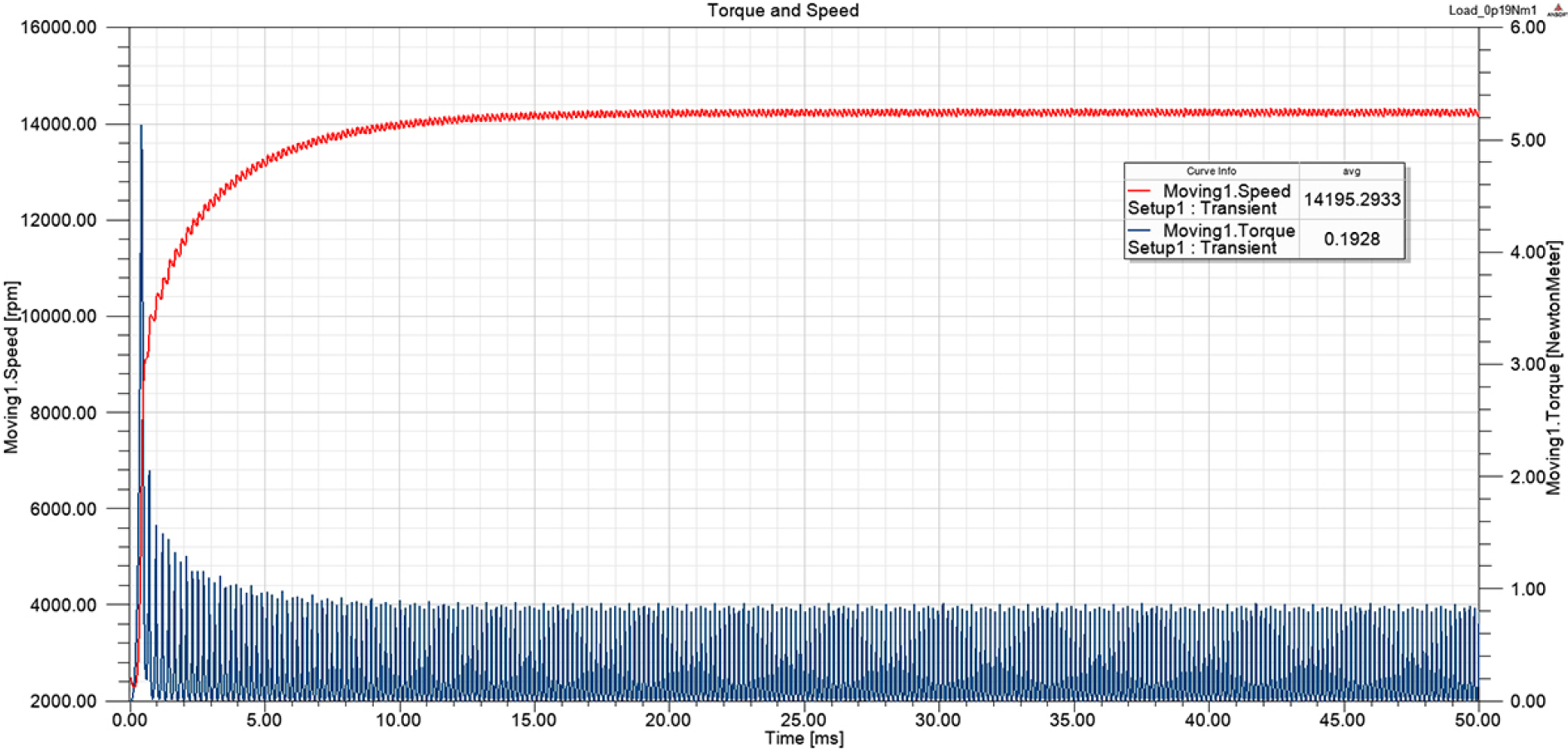
Fig. 17과 같은 입력 전압과 전류의 파형이 인가되었을 때 3상 전류의 크기들을 각각 Fig. 19와 같이 나타나게 된다. 약 0.19 Nm의 부하가 인가된 상태에서 과도상태를 거쳐 정상상태 속도까지 상승하는 SRM 모델의 동특성 해석 결과를 나타낸다. Fig. 20은 과도상태를 거쳐 정상상태(Steady State)에서 운전되기 가지의 SRM의 토크와 전류의 파형을 나타낸다. 본 연구에서 설계된 SRM의 정격 시 토크는 0.1928 Nm이고, 속도는 약 14,200 rpm가 되는 것을 확인할 수 있다.
결 론
본 연구에서는 Ansys사의 Maxwell 2D의 RMxprt와 EM-2D 모듈을 사용하여 기 설계된 SRM의 특성 해석을 수행하였다. 개발된 SRM의 정격사양은 300 W 15,000 rpm이지만, 2병렬 회로 모델의 특성해석 결과 4,575 rpm의 정격속도를 가지며, 이 때 출력은 약 215 W, 효율은 약 83% 정도의 사양을 확인할 수 있었다. 그러나, 4병렬 회로 모델의 특성 해석 결과에서는 약 15,000 rpm 의 정격을 가지며, 이 때 출력은 약 300 W, 효율은 약 94.7% 정도를 확인할 수 있었다. 전동력원 예초기용 SRM의 사양이 300W 15,000 rpm 이므로, 4병렬 회로를 갖는 SRM이 시스템 사양을 만족하는 적절한 모델임을 확인할 수 있었다. 한편 2병렬 회로 모델을 이용하면 요구 사양을 만족하지 못하기 때문에 적적하지 않지만 정격속도가 상대적으로 낮기 때문에 낮은 속도를 요구하는 조건일 경우 2병렬 회로 모델은 이용 가능할 것으로 예상된다.
